文章目录
- 前言
- 一、互补P4码序列
- 二、barker-OFDM 信号
- 1、OFDM 信号表达式
- 2、模糊函数表达式
- 三、MATLAB 仿真
- 1、MATLAB 核心源码
- 2、仿真结果
- ①、CP4-OFDM 模糊函数
- ②、CP4-OFDM 距离分辨率
- ③、CP4-OFDM 速度分辨率
- ④、CP4-OFDM 等高线图
- 四、资源自取
前言
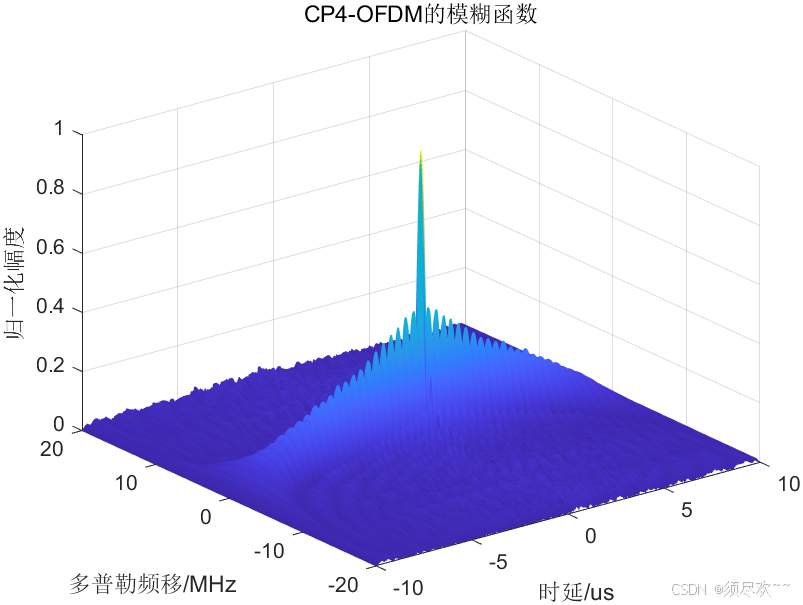
本文进行 CP4-OFDM 的原理讲解及仿真,首先看一下 CP4-OFDM 的模糊函数仿真效果:
一、互补P4码序列
P4 码表达式是:
θ m = π ( m − 1 ) 2 N s − π ( m − 1 ) \theta_m=\frac{\pi(m-1)^2}{N_s}{-\pi(m-1)} θm=Nsπ(m−1)2−π(m−1)
为了获得更理想的 P4 码自相关性能,研究了具有互补特性的 P4 码。以等长二元序列为例,其中 A = { a m } , a m = − 1 或1, m = 1 , 2 , … , 64 , B = { b m } , b m = − 1 或1 A= \begin{Bmatrix} a_m \end{Bmatrix},a_m=-1\text{或1,}\quad m=1,2,\ldots,\mathrm{64,}\quad B= \begin{Bmatrix} b_m \end{Bmatrix},b_m=-1\text{或1} A={am},am=−1或1,m=1,2,…,64,B={bm},bm=−1或1 ,可以分别求得各白的相关性,然后通过分析可以得到互补的 P4 码的互相关特性,两组序列的自相关函数为:
R A ( m ) = ∑ k = 0 N − 1 − ∣ m ∣ a k a k + m R B ( m ) = ∑ k = 0 N − 1 − ∣ m ∣ b k b k + m \begin{aligned} R_A(m) & =\sum_{k=0}^{N-1-|m|}a_ka_{k+m} \\ R_B(m) & =\sum_{k=0}^{N-1-|m|}b_kb_{k+m} \end{aligned} RA(m)RB(m)=k=0∑N−1−∣m∣akak+m=k=0∑N−1−∣m∣bkbk+m
若 R A ( m ) + R B ( m ) = { 2 N m = 0 0 m ≠ 0 R_A(m)+R_B(m)= \begin{cases} 2Nm=0 \\ 0\quad m\neq0 & \end{cases} RA(m)+RB(m)={2Nm=00m=0,则称两个序列为互补序列。
二、barker-OFDM 信号
1、OFDM 信号表达式
OFDM 信号提供了一种在频域上设计波形、时域上输出波形的 DFT 数字调制方式。OFDM 信号的数学表达式为:
B ( t ) = ∑ k = 0 N − 1 b k e j 2 π f k t = ∑ k = 0 N − 1 b k e j 2 π ( f 0 + k Δ f ) t B(t)=\sum_{k=0}^{N-1}b_ke^{j2\pi f_kt}=\sum_{k=0}^{N-1}b_ke^{j2\pi (f_0+k\Delta f)t} B(t)=k=0∑N−1bkej2πfkt=k=0∑N−1bkej2π(f0+kΔf)t
- b k :调制序列,为第 k 路子信道中的复输入数据 b_k:调制序列,为第 k 路子信道中的复输入数据 bk:调制序列,为第k路子信道中的复输入数据
- f k = f 0 + k Δ f f_k=f_0+k \Delta f fk=f0+kΔf, f 0 f_0 f0 为起始频率, Δ f \Delta f Δf 为频率间隔
2、模糊函数表达式
模糊函数是雷达探测波形分析的重要工具,通过对信号波形的模糊函数分析,可以得到信号波形的距离分辨率、多普勒分辨率及多普勒容限特性。
连续时间信号模糊函数的定义为:
χ ( τ , f d ) = 1 E ∫ − ∞ ∞ b ( t ) b ∗ ( t − τ ) e j 2 π f d t d t \chi (\tau,f_d)=\frac{1}{E} \int_{-\infty}^{\infty} b(t)b^{*}(t-\tau)e^{j2\pi f_dt} \,dt χ(τ,fd)=E1∫−∞∞b(t)b∗(t−τ)ej2πfdtdt
- 式中,E为信号的总能量;
离散时间序列的模糊函数表示为:
χ ( m , k d ) = 1 E c ∑ n e n e n − m ∗ e j 2 π N k d n \chi (m,k_d)=\frac{1}{E_c}\sum_{n}e_ne^{*}_{n-m}e^{j\frac{2\pi}{N}k_dn} χ(m,kd)=Ec1n∑enen−m∗ejN2πkdn
- 式中, m = f s × τ m=f_s×\tau m=fs×τ, f s f_s fs 为采样率;
- k d = f d × f s N k_d=\frac{f_d×f_s}{N} kd=Nfd×fs,N为采样点数
由于 M 序列是离散序列,结合上面公式可知 M-OFDM 信号的模糊函数为:
χ c p n ( m , k d ) = 1 E z ∑ n c p ( n ) c p ∗ ( n + k d ) e − j 2 π n m N \chi_{cp_n}(m,k_d)=\frac{1}{E_z}\sum_{n}cp(n)cp^{*}(n+k_d)e^{-j\frac{2\pi nm}{N}} χcpn(m,kd)=Ez1n∑cp(n)cp∗(n+kd)e−jN2πnm
三、MATLAB 仿真
1、MATLAB 核心源码
cp4_ofdm.m
%% CP4_OFDM信号产生
for i = 1:numOFDMsignel(i,:) = CP4Code(i)*exp(1j*2*pi*((f0 + B*(i-1))*t)); % OFDM 信号产生 将ZC序列与相应的频率因子相乘OFDMsignel(i,:) = awgn(OFDMsignel(i,:),SNR,'measured'); % 添加高斯白噪声到OFDM信号中,以实现指定的信噪比。
endambi = abs(xcorr2(bsxfun(@times, x_tmp, exp(1j*2*pi*fd'*t)),x_tmp)); %计算模糊函数 对信号做共轭相乘互相关
2、仿真结果
①、CP4-OFDM 模糊函数
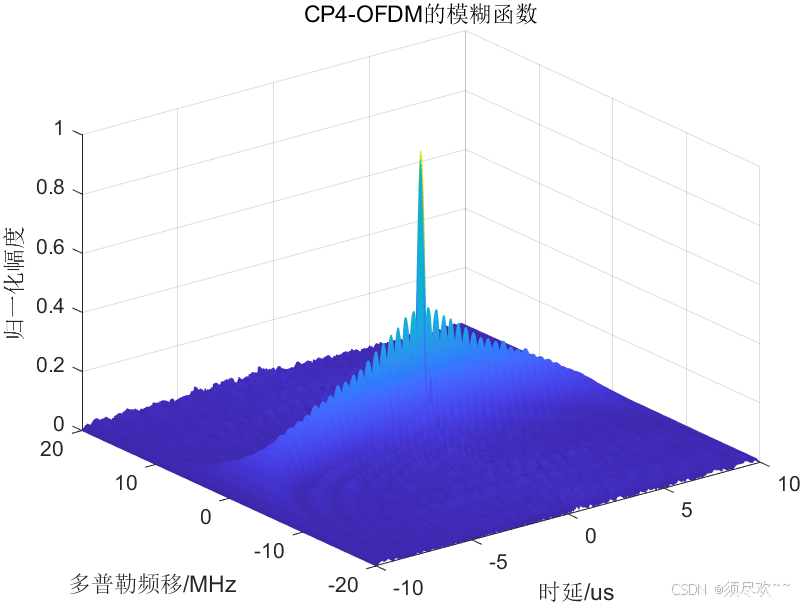
CP4-OFDM 的模糊函数通过尖锐主峰、低旁瓣和高对称性,展现了优异的时频联合分辨能力,为雷达与通信系统的性能优化提供了坚实的信号设计基础。
②、CP4-OFDM 距离分辨率
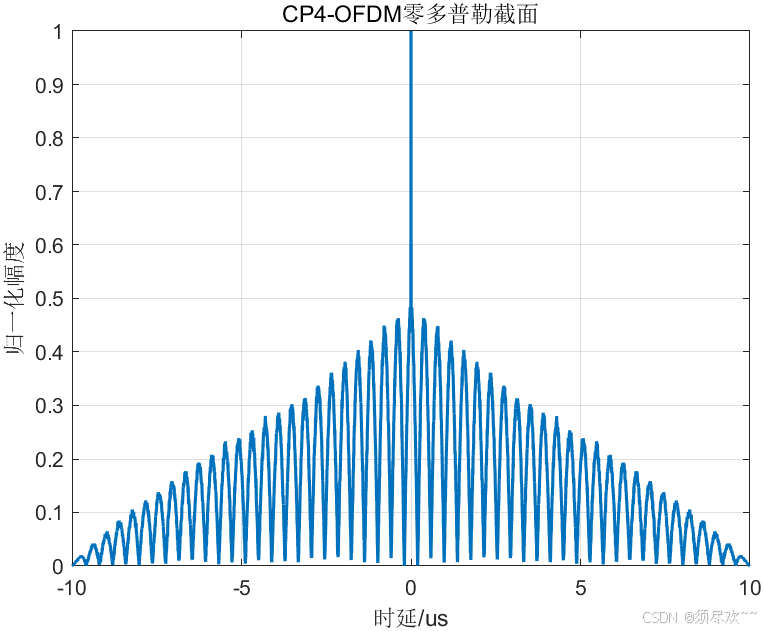
CP4-OFDM 信号的零多普勒截面表现出一个宽广的主峰,并且具有多个波动周期。CP4-OFDM的时间分辨率较弱,峰值较宽,说明它在时间域上的定位能力较差。
③、CP4-OFDM 速度分辨率
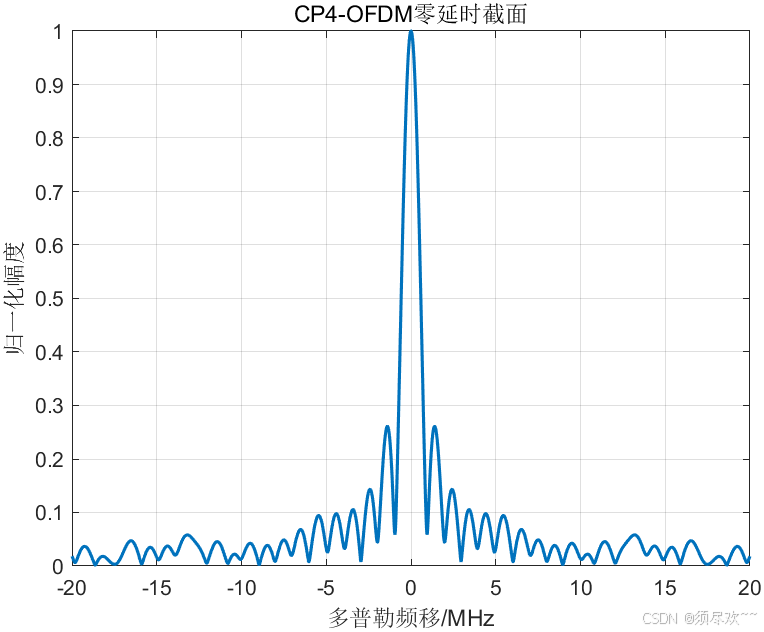
CP4-OFDM 信号的零延时截面均展现出极其尖锐的主峰,旁瓣非常小,这表明其在零延时处均具有最优秀的频率分辨率,能够在复杂环境下非常精准地定位频率位置,提供最精确的信号识别。
④、CP4-OFDM 等高线图

该模糊函数等高线图呈现中心主瓣清晰、旁瓣衰减快、时延-多普勒域分辨能力强、旁瓣抑制优 的特点,得益于互补序列与 OFDM 的结合,适用于对时延和多普勒分辨要求高的场景(如雷达目标检测、高速通信等),有效减少模糊干扰,提升系统性能。
四、资源自取
下载链接:CP4-OFDM模糊函数原理及仿真
代码注释标注清晰:
我的qq:2442391036,欢迎交流!