一、ADAS的概念
1.1 ADAS功能概述、架构方案、控制器、传感器
- 核心概念:ADAS(Advanced Driving Assistance System)是高级驾驶辅助系统的总称,包含三大类功能:
- 舒适体验类:如自适应巡航(ACC)、高速公路辅助(HWA)、车道居中控制(LKA)等
- 安全防护类:前碰撞预警(FCW)、盲点监测(BSD)、自动紧急制动(AEB)等
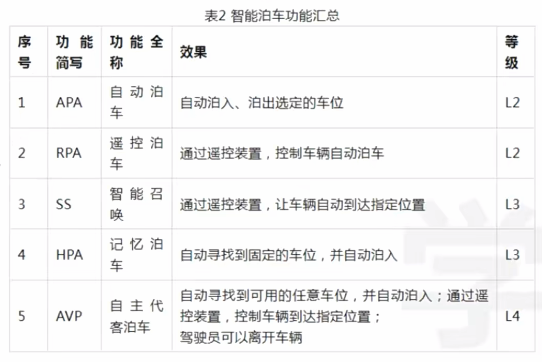
- 泊车辅助类:自动泊车(APA)、记忆泊车、远程遥控泊车等
- 系统架构:
- 传感器层:毫米波雷达、激光雷达、摄像头等作为"感知器官"
- 控制器层:核心运算单元处理传感器数据并决策
- 执行层:通过CAN总线发送控制指令给ESP、转向系统等执行器
- 重要性:
- 面试重点:架构方案(分布式/集中式)是常见面试问题
- 测试基础:理解架构才能设计有效测试用例
1.2 ADAS的测试过程、环境、设备、规程
- 测试特点:
- 必须实车测试:需要专用试验场地和昂贵设备(如假人系统)
- 无标准流程:各车企测试规范差异大,需灵活掌握核心思路
- 关键环节:
- 数据采集:通过VN1630等接口卡连接OBD口录制CANoe日志
- 日志分析:ASC格式日志需提交自动化小组生成统计报告
- 职业发展:
- 主要岗位:实车功能测试工程师(需求量大)
- 进阶方向:自动化测试需要Python和业务知识深度结合
1.3 ADAS功能测试详解:测试思路、功能详解
- 测试设计要点:
- 需考虑人机交互冲突场景(如打转向灯时的车道偏离预警)
- 定量测试依赖车企提供的信号矩阵表(如AEB触发时的TTC时间)
- 典型测试项目:
- 功能验证:报警准确性、系统响应阈值
- 性能测试:系统响应延迟、控制精度
- 失效模式:传感器遮挡、系统降级策略
1.4 使用Python对基于CANoe的ADAS日志分析
- 技术栈要求:
- Python编程能力:需熟练处理二进制数据解析
- 汽车协议知识:熟悉CAN协议和DBC文件解析
- 业务理解:清楚所分析ADAS功能的信号参数
- 工作流程:
- 采集ASC格式的CANoe日志
- 解析原始报文并计算物理量
- 生成包含关键指标的统计报告
- 职业定位:
- 属于自动化测试岗位而非功能测试
- 可作为功能测试工程师的加分技能
二、ADAS系统功能详解
2.1 系统定义与组成
- 完整定义:通过车载传感器实时感知环境,结合车辆状态数据进行智能决策,提供行车辅助功能的主动安全系统
- 核心三要素:
- 环境感知:毫米波雷达探测距离
d=cΔt2d=\frac{cΔt}{2}d=2cΔt
- 决策控制:基于碰撞时间TTC等参数触发AEB
- 人机交互:通过仪表报警、方向盘震动等方式警示
- 环境感知:毫米波雷达探测距离
2.2 SAE自动驾驶分级
- 两大标准体系:
- SAE(国际汽车工程师协会):分为L0-L5六个等级,是目前主流标准
- NHTSA(美国高速公路安全管理局):分为L0-L4五个等级
- 核心划分依据:
- 系统对车辆的控制维度(横向/纵向)
- 人类与系统的责任边界
- 环境监控主体(人类/系统)
- L0级:无自动化
- 定义特征:系统仅提供预警,不进行任何驾驶干预
- 法律责任:完全由人类驾驶员承担
- 典型功能:
- 前车碰撞预警(FCW):通过声音/灯光提示前车距离过近
- 盲点监测(BSD):后视镜区域警示灯闪烁
- 车道偏离预警(LDW):方向盘震动提示车道偏移

- 等级划分:
- L0:纯人工驾驶(仅提供预警)
- 典型功能:
- 前车碰撞预警(FCW):通过声音/灯光提示前车距离过近
- 盲点监测(BSD):后视镜区域警示灯闪烁
- 车道偏离预警(LDW):方向盘震动提示车道偏移
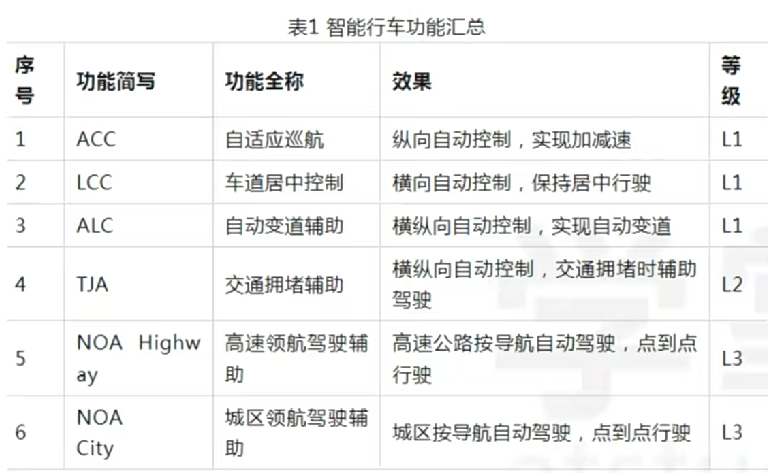
- L1:单项辅助(如定速巡航ACC)
- 核心标准:系统仅控制单一驾驶维度(横向或纵向)
- 行业现状:车企常将L1包装为"准L2"功能
- 典型案例:
- 纯ACC功能:仅控制车速,不介入转向(注意与LCC区分)
- 基础AEB:突发情况自动刹车但无转向避让
- 控制维度:
- 横向控制:方向盘转向(如车道保持辅助LKA)
- 纵向控制:加速/制动(如自动紧急制动AEB、自适应巡航ACC)
- L2:组合辅助
- 关键突破:系统同时控制横向+纵向两个维度
- 行业乱象:存在"L2+"营销话术,实际可能包含L3功能
- 责任边界:
- 系统执行多维度控制
- 人类需持续监控环境(车企免责关键点)
- 典型系统:
- 车道居中控制(LCC)+ ACC组合
- 自动泊车辅助(APA):控制转向+车速
- 高速自动变道:综合控制方向与加速
- L3:有条件自动驾驶(系统可请求接管)
- 质变特征:系统全权控制驾驶,人类仅需应答请求
- 技术特点:需要高精地图+冗余传感器支持
- 法律风险:
- 车企需对系统故障负责
- 导致普遍采用"L2+"规避法律认定
- 典型应用:
- 记忆泊车系统:学习固定路线后自主完成泊车
- 特斯拉智能召唤:停车场自动寻车功能
- 高速领航系统:需预设路线参数
- L4:高度自动驾驶(限定场景无需接管)
- 核心差异:人类可不响应系统请求,但限于特定场景
- 技术挑战:需解决"长尾问题"(罕见场景处理)
- 落地案例:
- 自主代客泊车(AVP):
- 在陌生停车场自主寻位
- 不依赖预先记忆路线
- 需停车场基础设施配合
- 矿区/港口无人驾驶
- 自主代客泊车(AVP):
- L5:完全自动驾驶
- 终极形态:
- 现状:
- 暂无商业落地案例
- 法律/伦理问题尚未解决
- 技术瓶颈:极端天气、复杂城市路况等
- 无方向盘、踏板等人工控制装置
- 适应所有道路环境(包括非铺装路面)
- 无需任何人类干预
- 现状:
- 标准体系:
- SAE J3016标准最具权威性
- NHTSA标准将L3-L5合并为L4
- 当前现状:
- 量产车最高达到L2+级别
- L3及以上存在法律和责任认定难题
2.3 ADAS的常见功能和等级对应
智能行车功能汇总:
智能泊车功能汇总:
主动安全功能汇总(仅提供预警的是L0,横向or纵向辅助是L1):

三、ADAS功能的实现
3.1 ADAS实现的原理
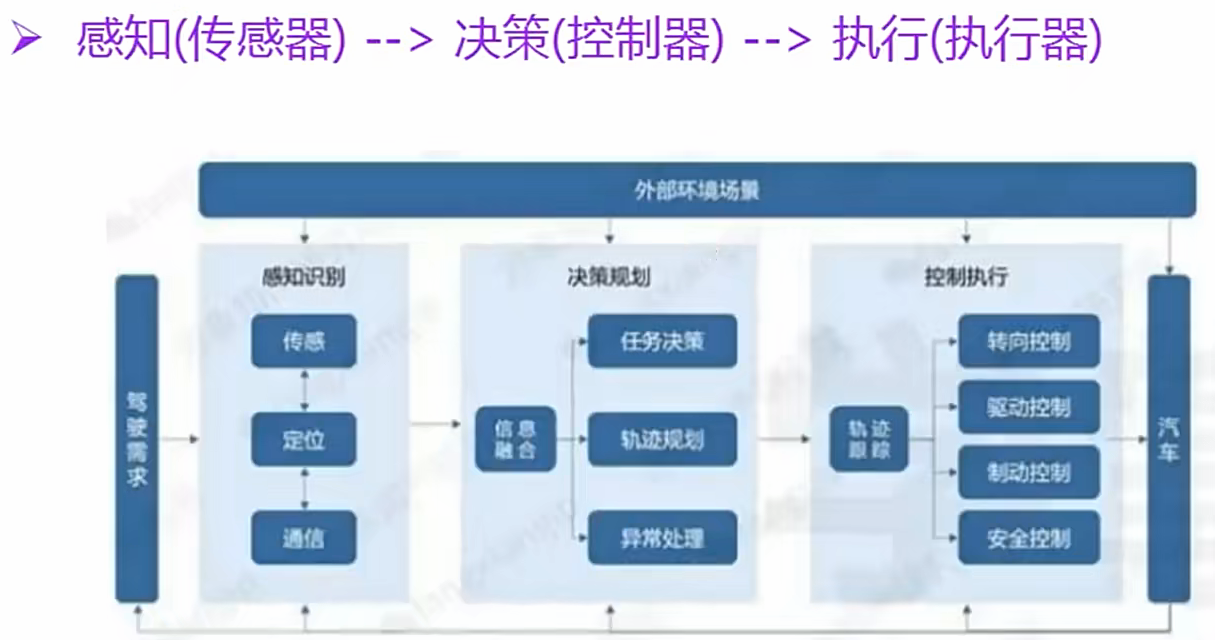
感知(传感器)→决策(控制器)→执行(执行器)。
举例:
自动紧急制动的工作流程
1. 感知:前方的毫米波雷达探测到有静止车辆,距离快速缩短;摄像头识别出那是一辆车的尾部。传感器融合确认目标存在且距离危险。
2. 决策: “大脑”计算碰撞时间极短,驾驶员没有踩刹车的迹象。风险评估为“极高碰撞风险”。决策:立即执行全力自动刹车!
3. 执行: “大脑”向电子稳定程序发送“全力刹车”指令。ESP系统瞬间控制刹车液压泵,对四个车轮施加最大制动力,车辆紧急刹停,避免或减轻碰撞。

3.2 汽车电子电气架构的演变
- 演变方向:从分布式ECU→集中式域控制器→集中式车辆中心计算
- 核心概念:EEA(Electronic Electrical Architecture)电子电气架构
- 演变意义:理解ADAS零部件演变和架构方案(分布式/集中式)的关键基础

(1)汽车电子电气架构的演变--- 分布式
每一个ECU就是一个“大脑”,独立完成特定功能;通过网关连接各ECU,无核心计算大脑。

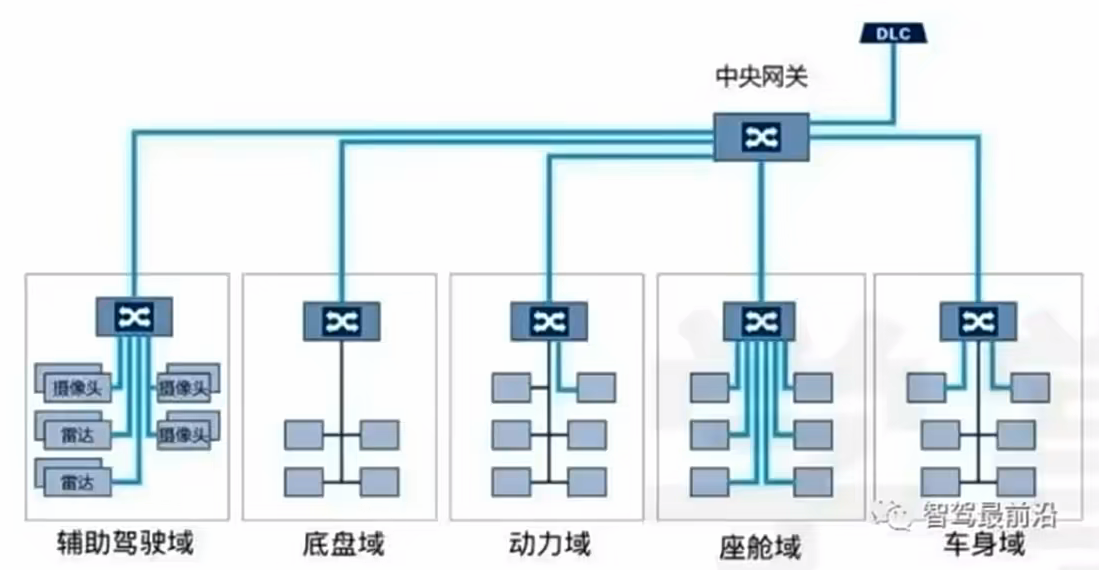
(2)汽车电子电气架构的演变--- 域集中式
引入域控制器(DCU,Domain Control Unit)。ECU仅执行简单指令,核心计算由域控制器完成。
- 典型架构:
- 特斯拉三域:左车身域、右车身域、中央域(按物理区域划分)
- 华为三域结构:智能行车域、智能座舱域、智能驾驶域
- 博世五域结构:动力域、底盘域、车身域、座舱域、辅助驾驶域
举例:
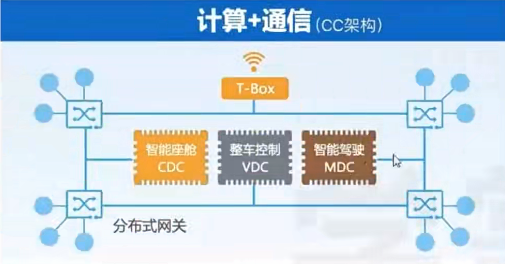
华为汽车CC架构
- 架构组成:
- 创新点:
- 将传统五域融合为三域
- 采用分布式网络+域控制器架构
- 计算+通信(Compute+Communication)架构
- 三大平台:
- MDC(智能驾驶平台):处理ADAS功能
- CDC(智能座舱平台):管理车机交互
- VDC(整车控制平台):整合动力、底盘、车身域
- 创新点: