1. Wavelib图像处理核心功能
Wavelib虽主要针对1D信号,但可通过分通道处理实现图像操作:
-
多级小波分解(DWT):提取低频(近似)和高频(细节)成分
-
图像去噪:阈值处理高频系数
-
边缘检测:增强水平/垂直细节分量
-
压缩:保留显著系数,舍弃微小值
2. 图像处理步骤(以灰度图为例)
(1) 安装依赖
确保已正确编译Wavelib(参考前文),并安装OpenCV用于图像读写:
bash
pip install opencv-python # Python接口(测试用)或通过C++直接使用OpenCV:
cpp
#include <opencv2/opencv.hpp>(2) 图像小波变换流程
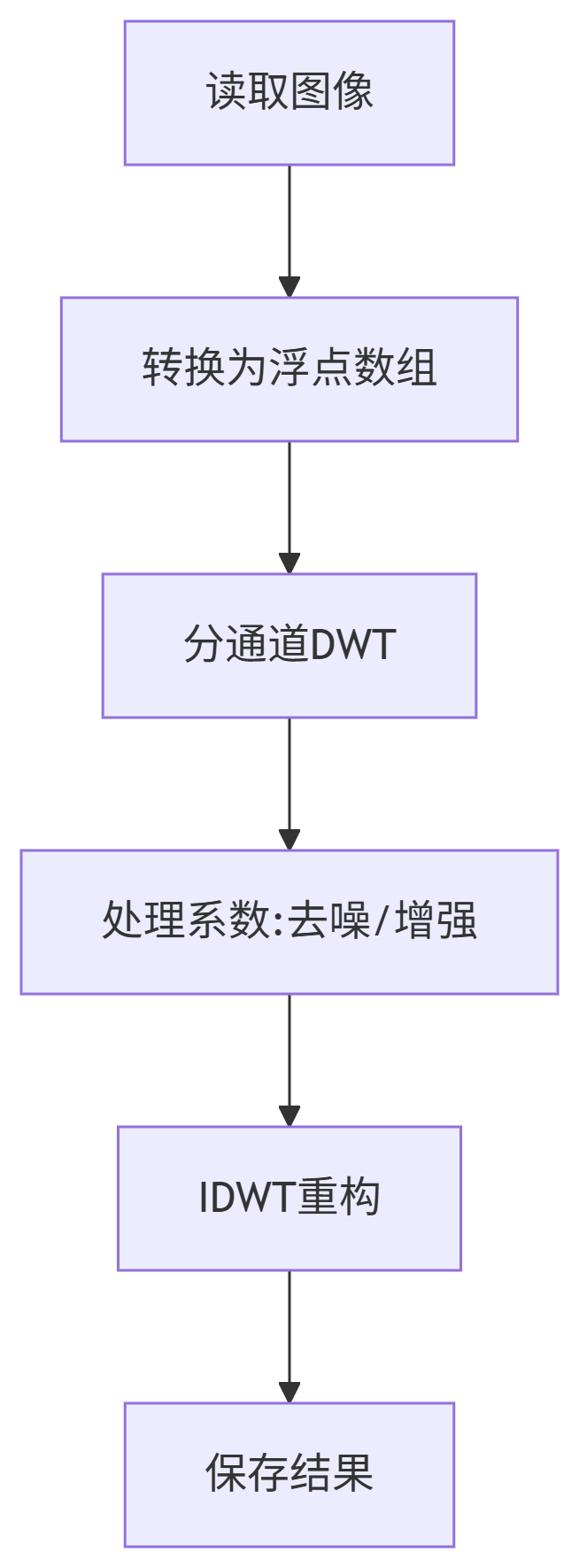
3. C++代码示例
(1) 图像DWT/IDWT(2D分解)
cpp
#include "wavelib.h"
#include <opencv2/opencv.hpp>
#include <cstring>void image_dwt_denoise(cv::Mat& img, const char* wname, int levels) {// 1. 转换为双精度浮点cv::Mat img_f;img.convertTo(img_f, CV_64F);// 2. 初始化小波对象wave_object wave = wave_init(wname);if (!wave) {fprintf(stderr, "Wavelet initialization failed\n");return;}// 3. 初始化二维小波变换对象wt2_object wt = wt2_init(wave, "dwt", img.rows, img.cols, levels);if (!wt) {fprintf(stderr, "WT2 object initialization failed\n");wave_free(wave);return;}// 4. 配置参数(关键修改点)setDWT2Extension(wt, "sym");strcpy(wt->cmethod, "fft"); // 直接设置卷积方法// 5. 执行2D DWT分解double* coeffs = dwt2(wt, (double*)img_f.data);// 6. 系数处理(示例:软阈值去噪)int total_coeffs = img.rows * img.cols;double noise_sd = 0.0;for (int i = total_coeffs/4; i < total_coeffs/2; i++) { // 估算HH1子带噪声noise_sd += fabs(coeffs[i]);}noise_sd = (noise_sd / (total_coeffs/4)) / 0.6745;double threshold = noise_sd * sqrt(2 * log(total_coeffs));for (int i = 0; i < total_coeffs; i++) {if (fabs(coeffs[i]) < threshold) {coeffs[i] = 0.0;}}// 7. 执行2D IDWT重构double* reconstructed = (double*)malloc(total_coeffs * sizeof(double));idwt2(wt, coeffs, reconstructed);// 8. 转换回图像cv::Mat result(img.rows, img.cols, CV_64F, reconstructed);result.convertTo(img, img.type());// 9. 释放资源free(reconstructed);wt2_free(wt);wave_free(wave);
}int main() {cv::Mat img = cv::imread("input.jpg", cv::IMREAD_GRAYSCALE);if (img.empty()) {fprintf(stderr, "Failed to load image\n");return -1;}image_dwt_denoise(img, "db4", 2);cv::imwrite("denoised.jpg", img);return 0;
}(2) 边缘增强
cpp
void edge_enhance(cv::Mat& img, float factor) {// ...(DWT后)// 增强水平/垂直细节分量(假设coeffs布局为LL, LH, HL, HH)int detail_start = lengths[0]; // 低频分量后的位置for (int i = detail_start; i < rows*cols; i++) {coeffs[i] *= factor; // 放大高频}// ...(IDWT重构)
}(3)完整的Wavelib图像处理示例
包含图像加载、多级小波分解、阈值去噪、重构保存全流程.
#include "wavelib.h"
#include <opencv2/opencv.hpp>
#include <vector>
#include <cstring>
#include <cmath>// 验证输入参数
void validate_parameters(const double* coeffs, int rows, int cols, int levels) {if (!coeffs || rows <= 0 || cols <= 0 || levels <= 0) {throw std::invalid_argument("Invalid parameters");}int min_dim = std::min(rows, cols);int max_levels = static_cast<int>(std::log2(min_dim));if (levels > max_levels) {levels = max_levels;}size_t required_size = 0;for (int l = 1; l <= levels; ++l) {int sub_size = (rows >> l) * (cols >> l);required_size += (l == levels) ? 4 * sub_size : 3 * sub_size;}if (required_size > static_cast<size_t>(rows * cols)) {throw std::invalid_argument("Insufficient coefficients array size");}
}// 归一化并复制子带
void normalize_and_copy(const cv::Mat& src, cv::Mat& dst, cv::Rect roi) {cv::Mat norm;cv::normalize(src, norm, 0, 255, cv::NORM_MINMAX, CV_8UC1);norm.copyTo(dst(roi));
}void visualize_subbands(const double* coeffs, int rows, int cols, int levels,const std::string& output_path = "d:/subbands.jpg") {try {// 1. 参数校验validate_parameters(coeffs, rows, cols, levels);// 2. 计算最小可用尺寸int min_dim = std::min(rows, cols);int max_levels = static_cast<int>(std::log2(min_dim));levels = std::min(levels, max_levels);// 3. 创建显示画布(固定为原始尺寸)cv::Mat canvas(rows, cols, CV_8UC1, cv::Scalar(0));// 4. 系数偏移指针const double* ptr = coeffs;// 5. 处理LL频带(最深层)int ll_size = rows >> levels;cv::Mat ll(ll_size, ll_size, CV_64F, const_cast<double*>(ptr));ptr += ll_size * ll_size;normalize_and_copy(ll, canvas, cv::Rect(0, 0, ll_size, ll_size));// 6. 处理各层细节子带for (int l = levels; l >= 1; --l) {int band_size = rows >> l; // 当前层子带尺寸int ll_pos = rows >> (l + 1); // 下一级LL位置(未使用)// LH (水平细节) - 右上cv::Mat lh(band_size, band_size, CV_64F, const_cast<double*>(ptr));ptr += band_size * band_size;normalize_and_copy(lh, canvas, cv::Rect(band_size, 0, band_size, band_size));// HL (垂直细节) - 左下cv::Mat hl(band_size, band_size, CV_64F, const_cast<double*>(ptr));ptr += band_size * band_size;normalize_and_copy(hl, canvas, cv::Rect(0, band_size, band_size, band_size));// HH (对角细节) - 右下cv::Mat hh(band_size, band_size, CV_64F, const_cast<double*>(ptr));ptr += band_size * band_size;normalize_and_copy(hh, canvas, cv::Rect(band_size, band_size, band_size, band_size));}// 7. 保存结果if (!cv::imwrite(output_path, canvas)) {throw std::runtime_error("Failed to save: " + output_path);}} catch (const std::exception& e) {std::cerr << "Error: " << e.what() << std::endl;}
}// 图像小波变换处理主函数
void wavelet_image_processing(cv::Mat& img, const char* wname, int levels,bool denoise=true, bool visualize=false) {// 1. 参数校验if (img.empty() || levels <= 0) {fprintf(stderr, "Invalid parameters\n");return;}// 2. 转换为双精度浮点cv::Mat img_f;img.convertTo(img_f, CV_64F);// 3. 初始化小波对象wave_object wave = wave_init(wname);if (!wave) {fprintf(stderr, "Wavelet initialization failed for %s\n", wname);return;}// 4. 检查最大可用分解层数int max_level = (int)(log2(std::min(img.rows, img.cols) / log2(2)));levels = std::min(levels, max_level);printf("Using %d decomposition levels\n", levels);// 5. 初始化二维小波变换对象wt2_object wt = wt2_init(wave, "dwt", img.rows, img.cols, levels);if (!wt) {fprintf(stderr, "WT2 object initialization failed\n");wave_free(wave);return;}setDWT2Extension(wt, "sym"); // 对称延拓//strcpy(wt->method, "fft"); // 直接设置卷积方法// 6. 执行2D DWT分解double* dwt_coeffs = dwt2(wt, (double*)img_f.data);// 7. 可视化子带(调试用)if (visualize) {visualize_subbands(dwt_coeffs, img.rows, img.cols, levels, "d:/1111.png");}// 8. 系数处理(去噪)if (denoise) {// 估计噪声标准差(使用HH1子带)int hh1_size = (img.rows >> 1) * (img.cols >> 1);double* HH1 = dwt_coeffs + 3 * hh1_size; // HH1位置double noise_sd = 0.0;for (int i = 0; i < hh1_size; i++) {noise_sd += fabs(HH1[i]);}noise_sd = (noise_sd / hh1_size) / 0.6745;double threshold = noise_sd * sqrt(2 * log(img.rows * img.cols));printf("Noise SD: %.2f, Threshold: %.2f\n", noise_sd, threshold);// 对细节子带进行软阈值处理int coeff_pos = 0;for (int l = 1; l <= levels; l++) {int subband_size = (img.rows >> l) * (img.cols >> l);// 跳过近似子带(LL)if (l == levels) coeff_pos += subband_size;// 处理LH/HL/HH子带for (int i = 0; i < 3 * subband_size; i++) {double* coeff = &dwt_coeffs[coeff_pos + i];double abs_val = fabs(*coeff);if (abs_val > threshold) {*coeff = (*coeff > 0) ? (*coeff - threshold): (*coeff + threshold);} else {*coeff = 0.0;}}coeff_pos += 3 * subband_size;}}// 9. 执行2D IDWT重构double* reconstructed = (double*)malloc(img.rows * img.cols * sizeof(double));idwt2(wt, dwt_coeffs, reconstructed);// 10. 转换回原图像类型cv::Mat result(img.rows, img.cols, CV_64F, reconstructed);result.convertTo(img, img.type());// 11. 释放资源free(reconstructed);wt2_free(wt);wave_free(wave);
}int main(int argc, char** argv) {// 参数设置const char* input_path = "C:/Users/Administrator/Desktop/test.jpeg";const char* output_path = "d:/output.jpg";int levels = 2;const char* wname = "db4";// 读取图像(支持彩色和灰度)cv::Mat img = cv::imread(input_path, cv::IMREAD_ANYCOLOR);if (img.empty()) {fprintf(stderr, "Failed to load image: %s\n", input_path);return -1;}// 分通道处理if (img.channels() == 1) {wavelet_image_processing(img, wname, levels, true, true);} else {std::vector<cv::Mat> channels;cv::split(img, channels);for (auto& channel : channels) {wavelet_image_processing(channel, wname, levels, true, true);}cv::merge(channels, img);}// 保存结果if (!cv::imwrite(output_path, img)) {fprintf(stderr, "Failed to save image: %s\n", output_path);return -1;}printf("Processing completed. Result saved to %s\n", output_path);return 0;
}编译:
g++ wavelet_image.cpp -o wavelet_image \-I/path/to/wavelib/include \-L/path/to/wavelib -lwavelib \`pkg-config --cflags --libs opencv4` \-lm -O24. 关键问题解决
Q1: 如何处理彩色图像?
-
方法:分RGB通道独立处理
cpp
std::vector<cv::Mat> channels;
cv::split(img, channels);
for (auto& ch : channels) {image_dwt(ch, "db4", 2);
}
cv::merge(channels, img);Q2: 如何选择小波基和分解层数?
-
小波基:
-
haar:计算快,适合边缘检测 -
db4/sym8:平衡时频局部化,适合去噪
-
-
层数:通常选2-3层,过多会导致低频信息丢失
Q3: 系数矩阵布局?
Wavelib的2D DWT输出按频带排列:
+---------+---------+
| LL (低频) | HL (水平细节) |
+---------+---------+
| LH (垂直细节) | HH (对角细节) |
+---------+---------+5. 性能优化建议
-
使用整数运算:对8位图像,可先转换为
int16减少计算量 -
并行化:OpenMP加速多通道处理
cpp
#pragma omp parallel for for (int ch = 0; ch < 3; ch++) {process_channel(channels[ch]); } -
内存复用:避免频繁分配/释放内存
6. 扩展应用
-
JPEG 2000压缩:模仿其量化策略
-
纹理分析:提取不同尺度的能量特征
-
融合算法:多图像的小波域融合






![[项目亮点(待结合自行设计的组件)]Vue中自定义设计——扩展性原则并以开源的vuedraggable为例](https://i-blog.csdnimg.cn/direct/901739f113f7431f827261a09d414654.png)
![【题解-洛谷】P9422 [蓝桥杯 2023 国 B] 合并数列](https://i-blog.csdnimg.cn/direct/da8e0f40104246c5b7eae54e21dc6790.png)

