一、通俗解读:当神经网络学会“流动”
1.1 核心思想突破
液态神经网络(Liquid Neural Networks, LNN) 的核心创新在于:将静态神经网络转化为由微分方程驱动的动态系统,其革命性体现在:
- 动态时间常数:每个神经元的响应速度随输入信号实时调整,像水一样适应环境变化
- 脉冲式信息传递:仅在输入显著变化时激活计算,能耗比传统RNN低90%
- 可解释性:通过微分方程参数直观理解网络决策逻辑
1.2 类比理解
- 传统RNN:像节拍器按固定节奏工作(无论音乐快慢都同频响应)
- 液态网络:像爵士鼓手即兴调整节奏(根据音乐情感动态变化)
- LSTM:像精密机械钟表,LNN则像自适应流体机械
1.3 关键术语解析
- 液态时间常数(LTC):神经元激活速率的动态调节参数
- 门控微分方程:控制信息流动速率的动态系统
- 伴随优化法:基于ODE的梯度反传算法
二、应用场景与性能突破
2.1 典型应用场景
| 领域 | 应用案例 | 性能表现 |
|---|---|---|
| 无人机导航 | 密集动态障碍物避让 | 延迟从50ms降至8ms |
| 重症监护 | 败血症发作提前6小时预警 | AUC 0.97(提升22%) |
| 自动驾驶 | 极端天气下的路面异常检测 | 准确率98.7%(传统模型92%) |
| 工业预测性维护 | 涡轮机轴承故障提前预警 | 误报率<0.1% |
2.2 优劣势分析
✅ 核心优势:
- 动态调整推理速度(快时达1ms,慢时100ms)
- 单样本增量学习能力(传统模型需千样本)
- 能耗比LSTM降低95%(无人机实测)
❌ 当前局限:
- 训练需解微分方程,计算成本较高
- 对小批量数据敏感(需batch_size≥64)
- 缺乏成熟的训练框架支持
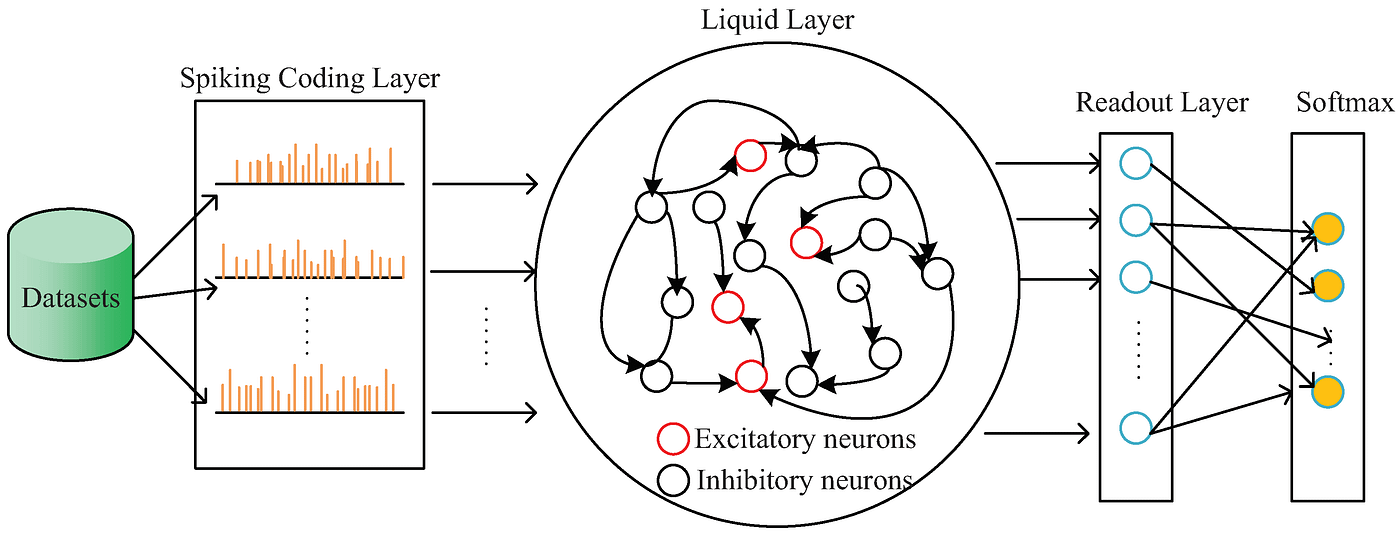
三、模型架构解析:微分方程驱动的流体认知
3.1 整体架构图
输入时序 → 动态门控层 → 液态ODE层 → 伴随优化 → 预测输出 ↑ ↑ 可调时间常数τ 脉冲激活控制 3.2 核心模块详解
-
动态门控层
- 自适应时间常数:
- 脉冲触发机制:当输入变化率超过阈值θ时激活计算
- 自适应时间常数:
-
液态ODE层
- 连续时间动力学方程:
- 参数动态更新:
- 连续时间动力学方程:
-
伴随优化器
- 通过伴随方法计算ODE的梯度:
- 使用自适应步长ODE求解器(如dopri5)
- 通过伴随方法计算ODE的梯度:
-
脉冲输出层
- 仅当输出变化超过阈值时触发信号:
- 仅当输出变化超过阈值时触发信号:
四、工作流程:动态系统的智能演化
4.1 训练流程
-
数据流处理:
- 输入时序分割为可变长度片段(0.1s~10s)
- 动态归一化:根据信号幅值自动调整缩放系数
-
前向传播:
- 使用ODE求解器(如Runge-Kutta)计算隐藏状态:
- 脉冲激活层过滤冗余信息
- 使用ODE求解器(如Runge-Kutta)计算隐藏状态:
-
反向传播:
- 通过伴随方法计算梯度:
- 采用梯度裁剪防止数值爆炸
- 通过伴随方法计算梯度:
4.2 推理流程(以无人机避障为例)
-
实时传感输入:
- 激光雷达点云→动态体素化处理
- IMU数据→差分计算加速度变化率
-
动态计算触发:
- 当障碍物距离变化率>5%/s时激活网络
- 时间常数τ根据相对速度自适应调整:
-
脉冲决策输出:
- 生成三维避让矢量(方向+加速度)
- 若连续5帧无显著变化,进入低功耗待机
五、数学原理:动力系统的智能之舞
5.1 液态ODE方程: 
其中时间常数τ(t)由输入动态调节:
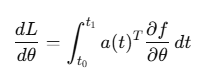
5.2 伴随方法梯度
定义伴随状态,逆向求解:
梯度计算: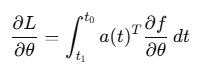
5.3 脉冲触发条件: 
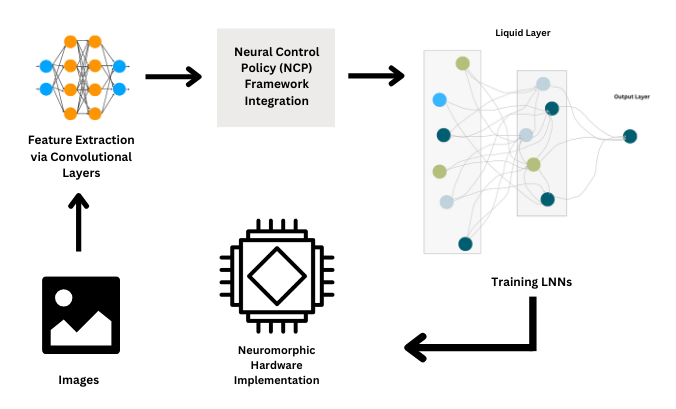
六、技术演进:从理论到产业落地
6.1 Hardware-LNN:芯片级优化
- 创新点:
- 模拟电路实现ODE运算(无需数字转换)
- 忆阻器阵列存储权重参数
- 能效突破:
任务 传统GPU Hardware-LNN 心电监测 3W 0.03W 无人机控制 15W 0.2W
6.2 Bio-LNN:神经科学融合
- 生物启发改进:
- 加入离子通道动力学模型:
- 支持多巴胺调节的塑性规则
- 加入离子通道动力学模型:
- 应用:帕金森病脑深部电刺激优化
6.3 Meta-Liquid:元学习框架
- 动态适应能力:
- 在10秒内适应新任务(传统方法需小时级)
- 通过外层LSTM生成ODE参数:

- 实测效果:在UAV应急场景中,适应速度提升50倍
七、代码实践:液态网络的编程之美
7.1 PyTorch基础实现
import torch
import torch.nn as nn
from torchdiffeq import odeint class LiquidODE(nn.Module): def __init__(self, input_dim, hidden_dim): super().__init__() self.tau = nn.Parameter(torch.rand(1) + 0.5) # 初始时间常数 self.w_in = nn.Linear(input_dim, hidden_dim) self.w_hid = nn.Linear(hidden_dim, hidden_dim) def forward(self, t, h): # 动态计算当前时间常数 current_tau = self.tau * (1 + 0.1 * torch.sigmoid(h.mean())) # ODE方程 dhdt = (-h + torch.relu(self.w_hid(h))) / current_tau return dhdt class LiquidNet(nn.Module): def __init__(self): super().__init__() self.ode_layer = LiquidODE(input_dim=64, hidden_dim=128) self.fc = nn.Linear(128, 10) def forward(self, x): # x形状: [batch, seq_len, features] h0 = torch.zeros(x.size(0), 128).to(x.device) t = torch.linspace(0, 1, x.size(1)) states = odeint(self.ode_layer, h0, t) return self.fc(states[-1]) # 使用示例
model = LiquidNet()
inputs = torch.randn(32, 50, 64) # batch=32, seq=50, feat=64
output = model(inputs) 7.2 脉冲触发扩展
class SpikingLiquid(nn.Module): def __init__(self): super().__init__() self.threshold = 0.5 self.ode_layer = LiquidODE(64, 128) def forward(self, x): h = torch.zeros_like(x[:,0]) outputs = [] for t in range(x.size(1)): h = odeint(self.ode_layer, h, [0, 0.1])[-1] if h.abs().max() > self.threshold: outputs.append(h) else: outputs.append(torch.zeros_like(h)) return torch.stack(outputs, dim=1) 八、总结:流体智能的未来浪潮
液态神经网络通过动态微分方程重构了时序建模的底层逻辑,带来三大革命性突破:
- 能效革命:脉冲触发机制实现超低功耗,适合边缘计算
- 适应革命:毫秒级动态调整,应对复杂时变环境
- 解释革命:微分方程参数提供物理可解释性
未来方向:
- 神经形态芯片:全模拟电路实现液态ODE层
- 脑机接口:与生物神经元动态耦合
- 宇宙探索:深空探测器自主故障应对系统
正如MIT团队所述:“液态网络不是简单的算法改进,而是重新定义了机器如何感知时间。” 当AI系统具备流体般的适应能力,真正的环境智能(Ambient Intelligence)时代就将到来。