简称 DP,是一种求解多阶段决策过程最优化问题的方法。在动态规划中,通过把原问题分解为相对简单的子问题,先求解子问题,再由子问题的解而得到原问题的解。
一、概念
动态规划最早由理查德 · 贝尔曼于 1957 年在其著作「动态规划(Dynamic Programming)」一书中提出。这里的 Programming 并不是编程的意思,而是指一种「表格处理方法」,即将每一步计算的结果存储在表格中,供随后的计算查询使用。
1. 核心思想
把「原问题」分解为「若干个重叠的子问题」,每个子问题的求解过程都构成一个 「阶段」。在完成一个阶段的计算之后,动态规划方法才会执行下一个阶段的计算。
在求解子问题的过程中,按照「自顶向下的记忆化搜索方法」或者「自底向上的递推方法」求解出「子问题的解」,把结果存储在表格中,当需要再次求解此子问题时,直接从表格中查询该子问题的解,从而避免了大量的重复计算。
这看起来很像是分治算法,但动态规划与分治算法的不同点在于:
- 适用于动态规划求解的问题,在分解之后得到的子问题往往是相互联系的,会出现若干个重叠子问题。
- 使用动态规划方法会将这些重叠子问题的解保存到表格里,供随后的计算查询使用,从而避免大量的重复计算
2. 动态规划的简单例子
下面我们先来通过一个简单的例子来介绍一下什么是动态规划算法,然后再来讲解动态规划中的各种术语

通过公式 f(n)=f(n−2)+f(n−1),我们可以将原问题 f(n) 递归地划分为 f(n−2) 和 f(n−1) 这两个子问题。其对应的递归过程如下图所示
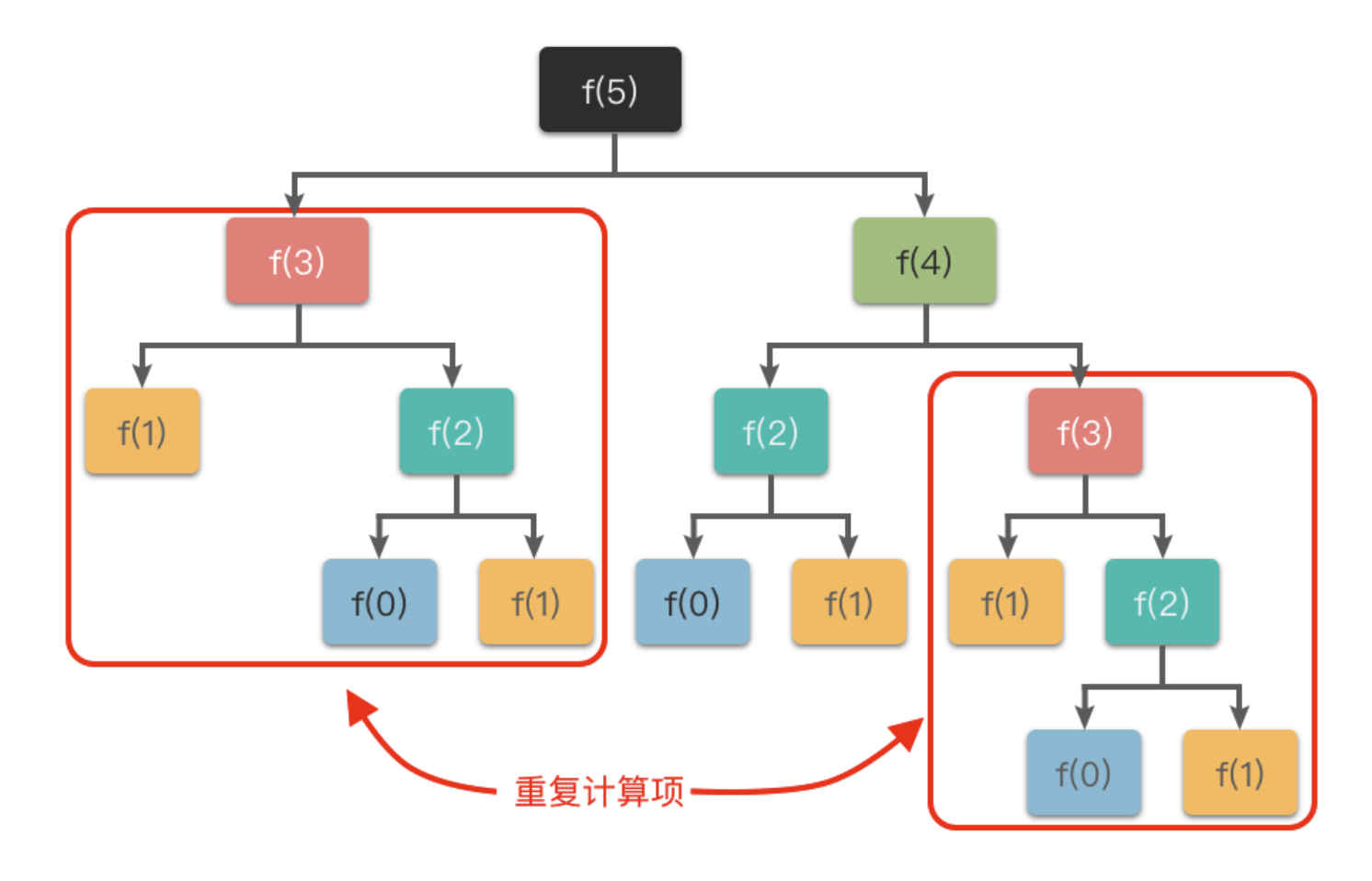
从图中可以看出:如果使用传统递归算法计算 f(5),需要先计算 f(3) 和 f(4,而在计算 f(4) 时还需要计算 f(3),这样 f(3)就进行了多次计算。同理 f(0)、f(1)、f(2)都进行了多次计算,从而导致了重复计算问题。
为了避免重复计算,我们可以使用动态规划中的「表格处理方法」来处理。
这里我们使用「自底向上的递推方法」求解出子问题 f(n−2)和 f(n−1)的解,然后把结果存储在表格中,供随后的计算查询使用。具体过程如下:
- 定义一个数组 dp,用于记录斐波那契数列中的值。
- 初始化 dp[0]=0,dp[1]=1。
- 根据斐波那契数列的递推公式 f(n)=f(n−1)+f(n−2),从 dp(2)开始递推计算斐波那契数列的每个数,直到计算出 dp(n)。
- 最后返回 dp(n) 即可得到第 n 项斐波那契数。
class Solution {// 计算斐波那契数列的第 n 个元素fib(n) {// 处理特殊情况:n为0时,斐波那契数列的第0个元素为0if (n === 0) {return 0;}// 处理特殊情况:n为1时,斐波那契数列的第1个元素为1if (n === 1) {return 1;}// 初始化动态规划数组,长度为n+1const dp = new Array(n + 1).fill(0);// 初始值:第0个元素为0,第1个元素为1dp[0] = 0;dp[1] = 1;// 从第2个元素开始,通过动态规划计算斐波那契数列的每个元素for (let i = 2; i <= n; i++) {dp[i] = dp[i - 2] + dp[i - 1];}// 返回计算得到的第n个斐波那契数列元素return dp[n];}
}// 示例用法
const solution = new Solution();
const result = solution.fib(7); // 13
console.log(result);
二、动态规划的特征
究竟什么样的问题才可以使用动态规划算法解决呢?
首先,能够使用动态规划方法解决的问题必须满足以下三个特征:
- 最优子结构性质
- 重叠子问题性质
- 无后效性
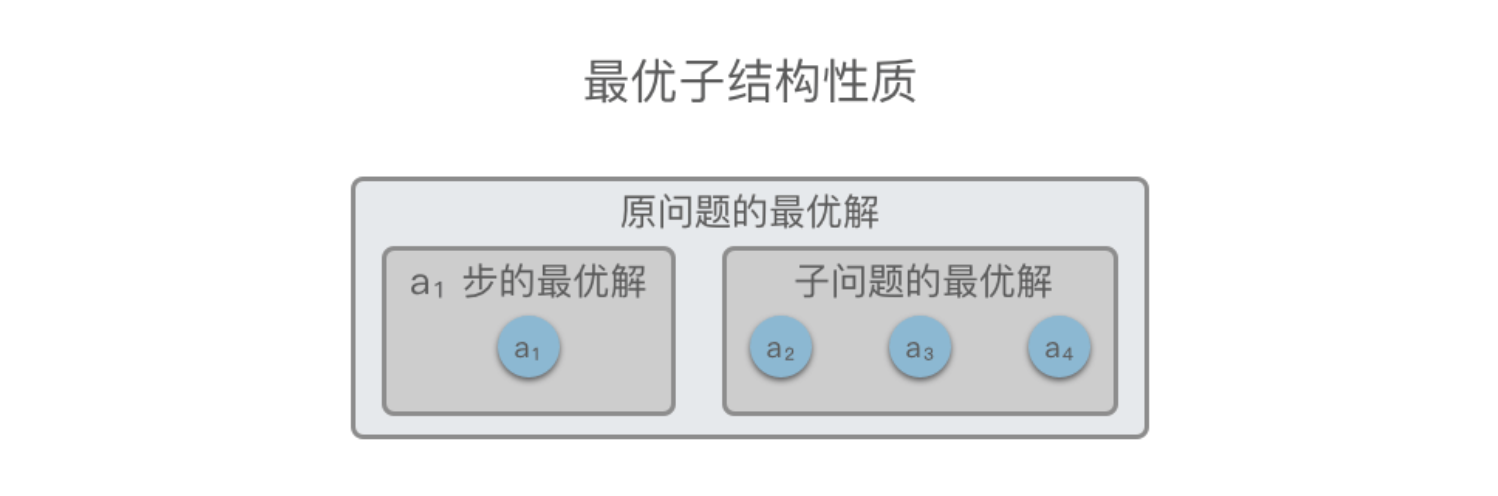
1. 最优子结构性质
指的是一个问题的最优解包含其子问题的最优解
举个例子,如下图所示,原问题 S={a1,a2,a3,a4} ,在 a1步我们选出一个当前最优解之后,问题就转换为求解子问题 S子问题={a2,a3,a4}。如果原问题 S的最优解可以由「第 a1步得到的局部最优解」和「 S子问题S_子问题的最优解」构成,则说明该问题满足最优子结构性质。
也就是说,如果原问题的最优解包含子问题的最优解,则说明该问题满足最优子结构性质
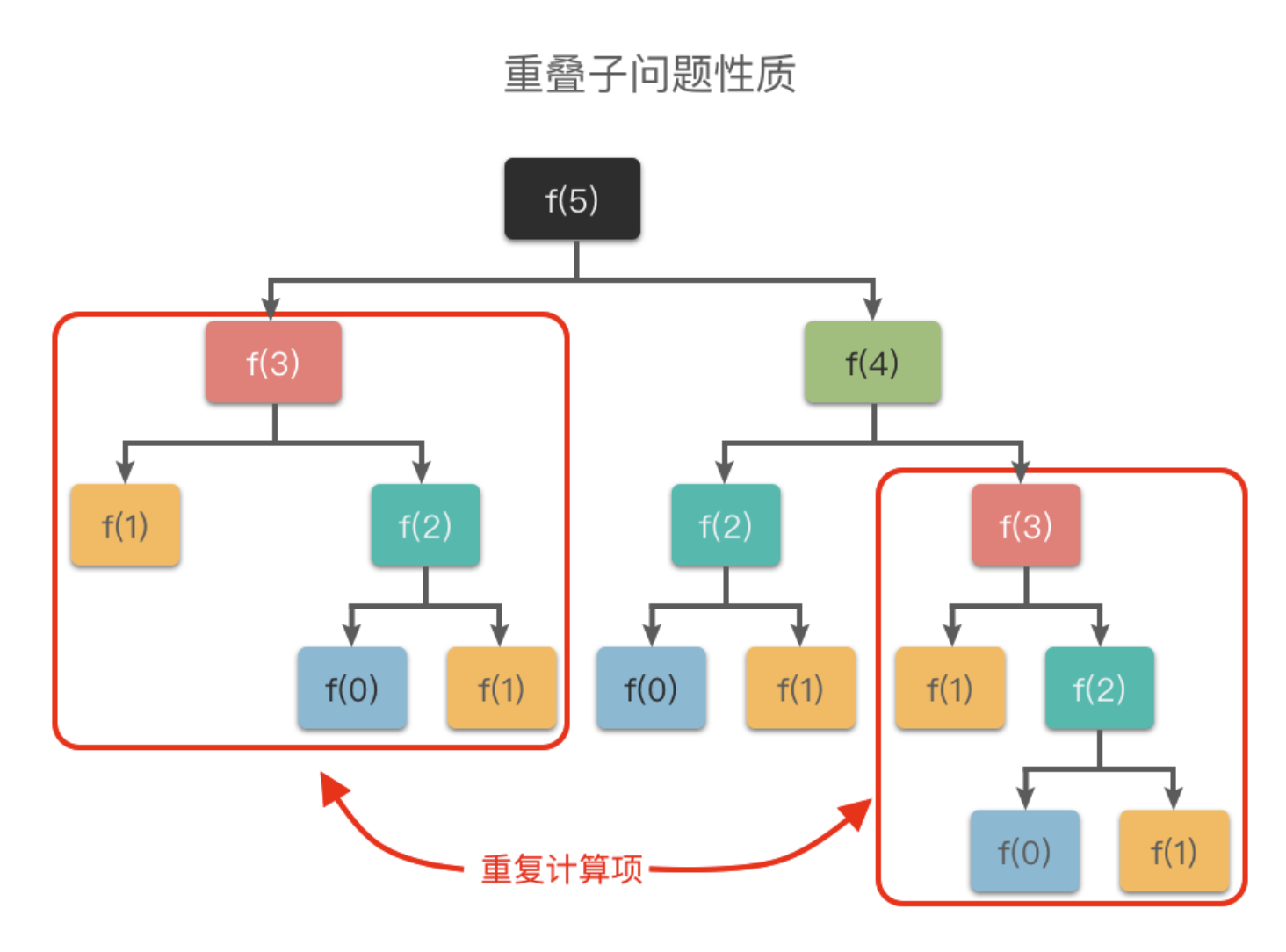
2. 重叠子问题性质
指的是在求解子问题的过程中,有大量的子问题是重复的,一个子问题在下一阶段的决策中可能会被多次用到。如果有大量重复的子问题,那么只需要对其求解一次,然后用表格将结果存储下来,以后使用时可以直接查询,不需要再次求解
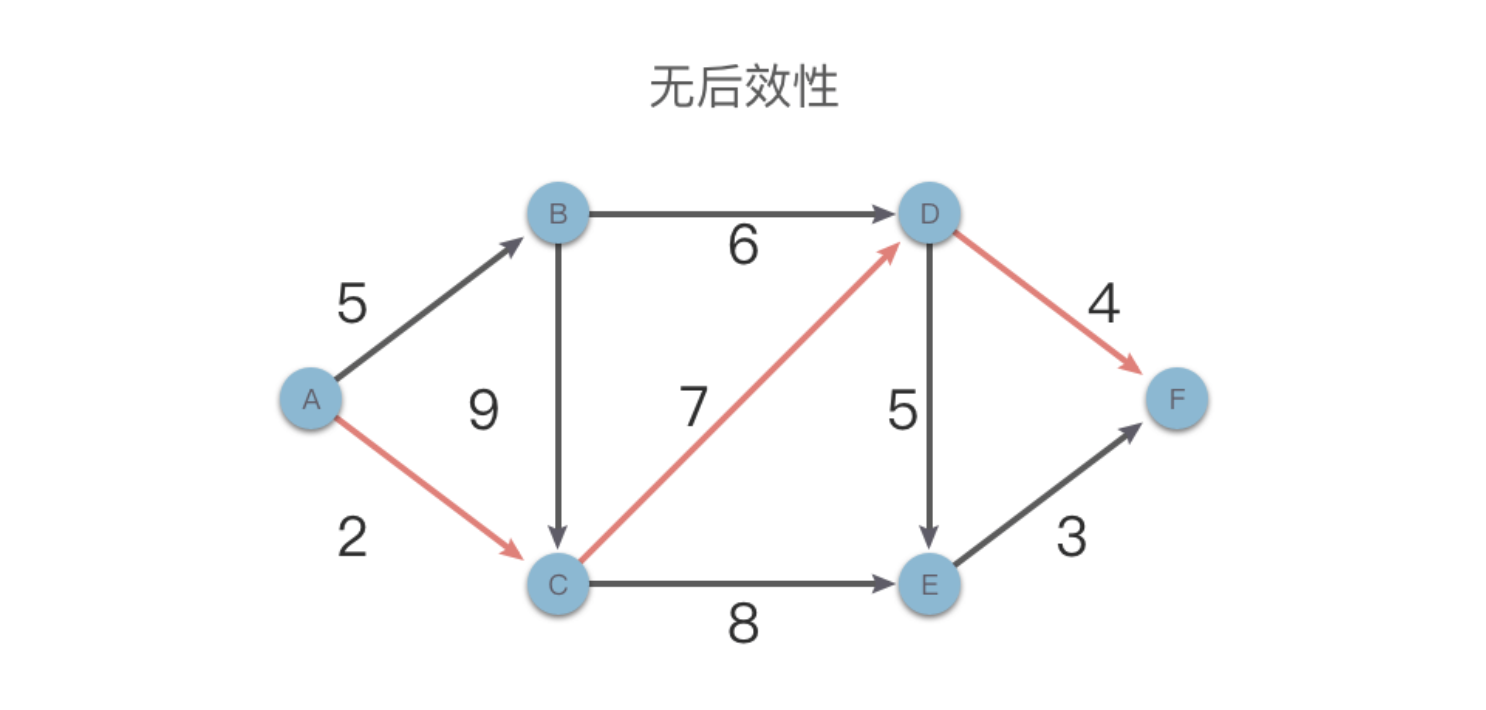
3. 无后效性
指的是子问题的解(状态值)只与之前阶段有关,而与后面阶段无关。当前阶段的若干状态值一旦确定,就不再改变,不会再受到后续阶段决策的影响。
也就是说,一旦某一个子问题的求解结果确定以后,就不会再被修改。
举个例子,下图是一个有向无环带权图,我们在求解从 A 点到 F 点的最短路径问题时,假设当前已知从 A点到 D点的最短路径(2+7=9)。那么无论之后的路径如何选择,都不会影响之前从 AAA 点到 DDD 点的最短路径长度。这就是「无后效性」。
而如果一个问题具有「后效性」,则可能需要先将其转化或者逆向求解来消除后效性,然后才可以使用动态规划算法。
三、动态规划的基本思路
如下图所示,我们在使用动态规划方法解决某些最优化问题时,可以将解决问题的过程按照一定顺序(时间顺序、空间顺序或其他顺序)分解为若干个相互联系的「阶段」。然后按照顺序对每一个阶段做出「决策」,这个决策既决定了本阶段的效益,也决定了下一阶段的初始状态。依次做完每个阶段的决策之后,就得到了一个整个问题的决策序列。
这样就将一个原问题分解为了一系列的子问题,再通过逐步求解从而获得最终结果。
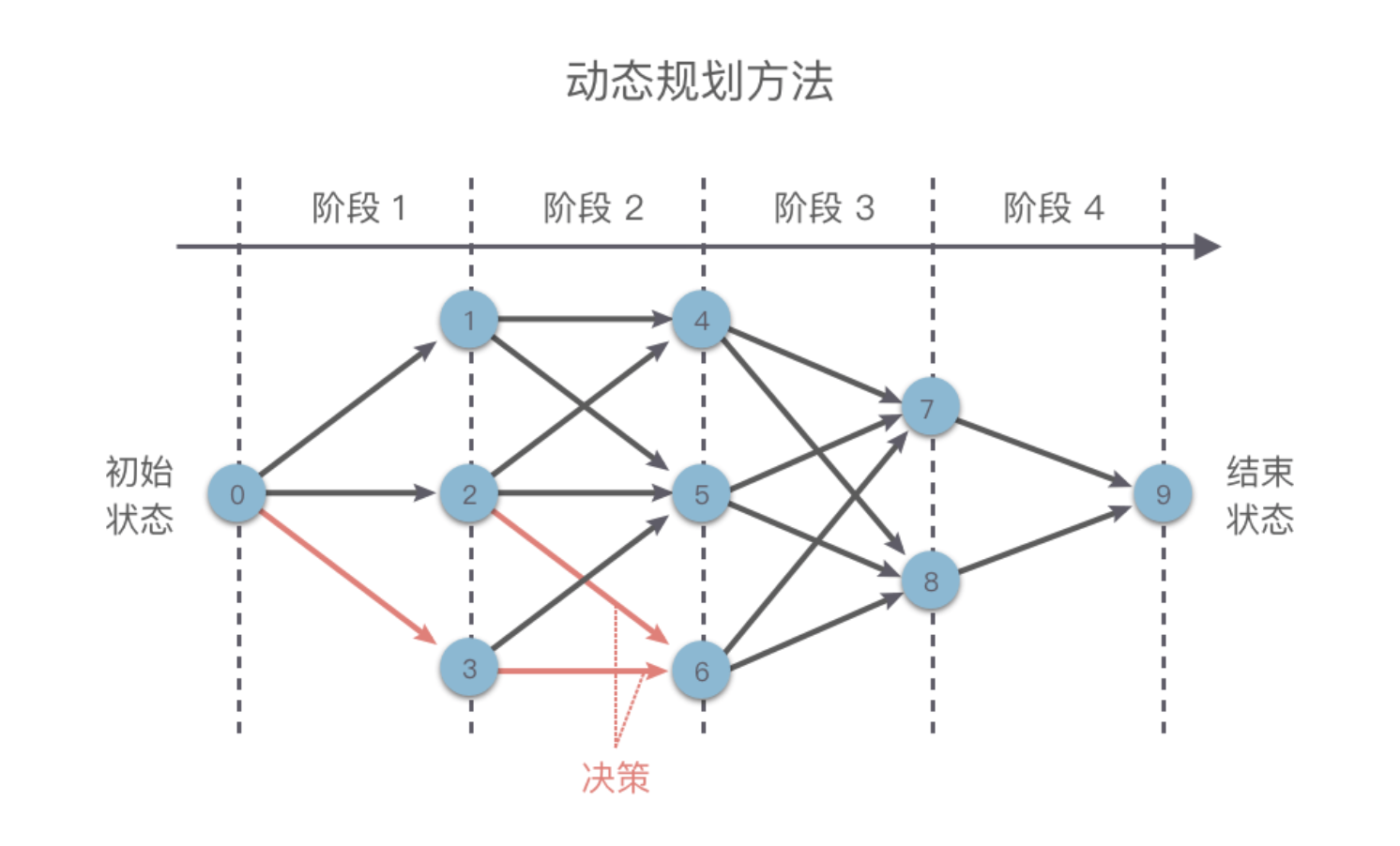
这种前后关联、具有链状结构的多阶段进行决策的问题也叫做「多阶段决策问题」。
通常我们使用动态规划方法来解决问题的基本思路如下:
- 划分阶段:将原问题按顺序(时间顺序、空间顺序或其他顺序)分解为若干个相互联系的「阶段」。划分后的阶段⼀定是有序或可排序的,否则问题⽆法求解。
-
- 这里的「阶段」指的是⼦问题的求解过程。每个⼦问题的求解过程都构成⼀个「阶段」,在完成前⼀阶段的求解后才会进⾏后⼀阶段的求解。
- 定义状态:将和子问题相关的某些变量(位置、数量、体积、空间等等)作为一个「状态」表示出来。状态的选择要满⾜⽆后效性。
-
- 一个「状态」对应一个或多个子问题,所谓某个「状态」下的值,指的就是这个「状态」所对应的子问题的解。
- 状态转移:根据「上一阶段的状态」和「该状态下所能做出的决策」,推导出「下一阶段的状态」。或者说根据相邻两个阶段各个状态之间的关系,确定决策,然后推导出状态间的相互转移方式(即「状态转移方程」)。
- 初始条件和边界条件:根据问题描述、状态定义和状态转移方程,确定初始条件和边界条件。
- 最终结果:确定问题的求解目标,然后按照一定顺序求解每一个阶段的问题。最后根据状态转移方程的递推结果,确定最终结果。