04 自锁、正反转电路
我们讲一下这个自锁和正反转。
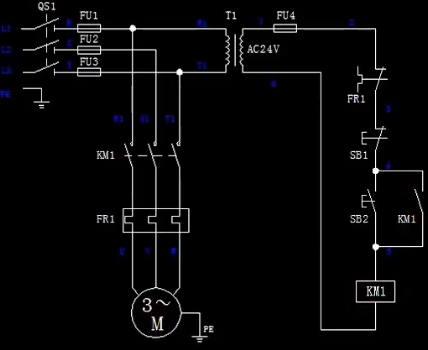
自锁电路图示例图
加了一个这个 KM1 自锁。加了 KM1 的辅助触头,它怎么实现呢?它怎么就自锁了呢?没加它的时候为什么是点动?加它为什么自锁?
讲解一下。首先我们同样是这个电把它送过来了,是不是? KM1 得电, KM1 得电了(右侧的线圈)它相应的触头也会闭合啊,你常闭的就断开,常开的就变成闭合。
好,现在我们来看看,它 KM1 得电(右侧的线圈),主触头(左侧的KM1)是不是闭合了?闭合了这个电机转(3~M电机转)?
好,当我们这个 SB2 松开手,而我们这个 KM1(右侧的线圈) 闭合之后,它的辅助触头(右侧的KM1触头)是不是也跟着闭合? 闭合了,这时这个 SB2 松开手了,电也可以一直从这边跑过来了。跑过来之后的话,致使这个这边没电(SB2),这边有电(右侧的KM1触头),跑过来是不是 KM1(右侧的线圈) 一直有电?一直有电这个 KM1 的辅助触头一直闭合,一直闭合的话它一直有电。
所以导致它的连续循环,所以说导致它自己锁住自己啊,简称为自锁。这样子,只要你这个前面不停止的话(SB1),他这边电一直从这边来(SB1)。KM1 线圈有电,KM1 触点一直闭合,闭合KM1 线圈一直也有电。所以连续的循环。
当我们按下 SB1 停止按钮的时候。这个电过不来,KM1 线圈是不是没电了呢?它没电了之后的话,主触头就会复原(左侧的KM1),也就是断开了,这个电就过不来了。同样它这个辅助触头也会还原,变成断开了,电也过不来了。当我们再次松开 SB1 的时候,虽然你这电又从那经过这里了,也是经过这里,但是你这边有座桥了(辅助触头KM1),也是过不来了,这边有座桥(SB2)也是过不来了,所以它就停止了(右侧的KM1线圈) 。
自锁就这意思,就是用它对应的线圈的辅助触头,来锁住自己,这样子就自锁。
【假设上面“自锁电路图示例图”左侧是电机正转接法】
一个电机,它可以正转,可以反转。这三相电动机怎么来实现它的正转反转呢?好,只要我们把这个线序,它这个线序不同的,你看这 L1、L2、L3,这代表三个线序。只要两根线序反一下的话,它就会变成反转。
比如说我们这个是这样接的是不是(3~M电机)? U,V,W,这样接是正转对吧?假如我们把这个 U 和 V 这两个线调过来的话,我们在接线的时候把它调过来。同样地,我们只调 V 和 W, 它也是反转的,是不是?……, 它也会反转。
只要我们这个线序有两线在这里调。或者我们把这个 L1 和 L2 调一下吧,线序互相反一下吧,那电机也会反反转。
只要两个线序反一下就,它就会反转了。
当然,你一次反了多个线序,它又变成正转,是不是?你不能同时换多个线啊。你想让这个电机反转的话,你只要换两根线就可以了。
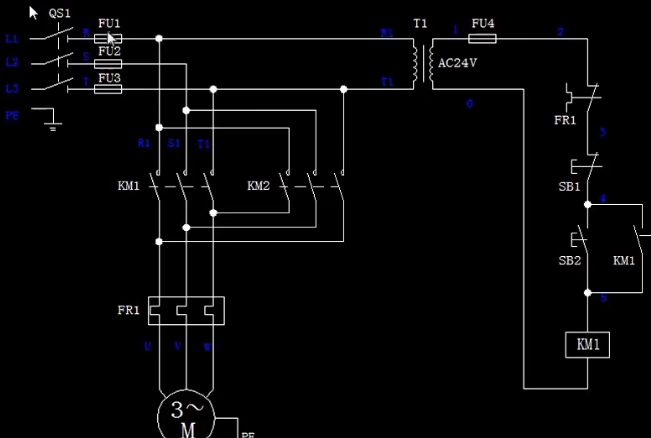
正反转电路图示例图
好,既然我们知道它如何正转,如何实现它反转?
好,画黑点的话就是(相当于白点),就相当于这个导线在这里连接的,你看这里有三个叉路口,是不是?这黑点就相当于我连接起来了。
我这里为什么没画黑点?因为我这导线经过的时候我现在跨过去了。我没跟它连接,连接的地方吧,画黑点。画黑点呢就相当于我这个线和它连接一起的。
这个是 L1,这么来,是不是 U? L1 的话是不是 U? 现在如果是 KM1 (主触头)接通的话,它是不是 U?
L2 这个线是不是从这边来?是不是 V?L3从这边翻下去,是不是,是 W。
假如说 KM1 断开,接通 KM2 的时候,你看 L1 从这边来,是不是,往这边跑,是不是变成 W 了(原来是 U )?
L2 这个线没变,往这边跑,还是它 V。L3从最后这边来,是不是,变 U 了(原来是 W )。
是不是变这个 U 和 W 位置换一下了?换一下它有反转,普通电机就有这种功能。
为什么我们这两不能同时闭合(KM1 和 KM2),同时闭合它会短路啊。
首先我们看这根线 L1,这个是不是可以往这边过来?是不是?然后你看这 L3 也往这边过来,是不是?【同时闭合,都连到 U 了】
它的 L1 和 L3 是两个不同的线序,不同线序的话,你一连接起来的话,它就形成短路。短路是很危险的。
这点相当于把这个 L1 和 L3 连接起来,L1 和 L3 的话连接起来就是短路了,它线序不同的话,线序不同就不能接在一起了。
线序怎么产生的呢?是我们发电机的时候,这其实扯远了,大家知道有线序这么一回事就可以了。
画控制电路的时候要注意一下,注意一下 KM1 吸合的时候 KM2 必须不能吸合,KM2 吸合的时候 KM1 必须不能吸合!
好,现在我们这个 SB2 是正转按钮,我们搞个 SB3 是反转按钮?怎么搞到反转按钮呢?我们这样子是,可以控制 KM1 了 (右侧的KM1线圈,即左侧的 KM1主触点)。
好,我们再拿个按钮控制 KM2,它就实现了正转和反转切换了啊。
这个是用 KM2、KM1,这边用 KM2,我们为什么这样用啊?互锁的话就是互相锁住。
我们开始自锁,自锁的话是用自己的辅助触头,互锁的话是用别人的辅助触头;别人的常闭触头互锁,互锁用常闭触头啊,自锁用常开触头,大家记住啊。
自锁什么意思呢?你看我们这里,你看我们这电从这边过来(SB2->KM2)。。KM1(线圈) 一得电,辅助触头 KM1 是不是闭合了(SB2 水平的 KM1)?
同样的常闭的会不会变成常开的?同样也会把这个切掉(SB3->KM1 辅助触头切掉)。这里的话变成开了,这 SB3 一得电,这条你过不来是不是?过不来这个 KM2(线圈) 也不会得电,它就实现互锁功能了。
互锁就是你 KM1(线圈) 一得电的话,它这个常闭触点(SB3->KM1 辅助触头)就变成开,KM2(线圈) 再怎么也不会得电;
假如 KM2(线圈) 一得电的话,KM2(SB2->KM2 辅助触头) 这里就断开,KM1(线圈) 再怎么也不会得电。
所以说这就是互锁,相互性的,它交叉型的,你看是不是交叉型的?
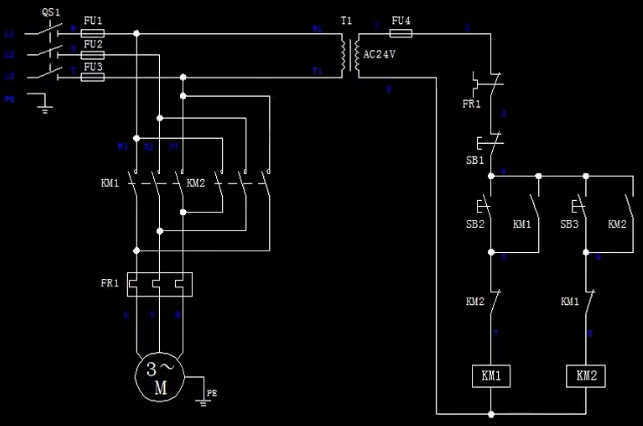
自锁+互锁电路图示例图
我们也可以在这加个按钮(SB2->KM1)互锁,是不是?我可以在这里加个按钮(SB2->KM1)的常闭,但是挺麻烦的啊。
我们这里一般都是加的接触器的常闭点,有正反转的话,必须要这样加,因为我们要保证这个主电路的安全性,主电路的不要它(主电路的KM1 和 KM2) 两个同时得电,要保证它的安全性。
OK,这样的话就是正反转电路,我们按下 SB2,它 KM1(线圈) 得电,辅助触头 KM1 自锁,主触头 KM1 就闭合,闭合电机正转,正转的话它(SB3->KM1 辅助触头) 这里是断开的,你按下 SB3 也没用了。
我们再按下 SB1 停止,停了之后的话 KM1(线圈) 就失电,失电的话它(SB2 水平的 KM1)这个自锁就断开,主触头 KM1 也断开;断开之后把这个(SB3->KM1 辅助触头) 也复原,这本来是开的,复原变成闭合了,我们这时候再按下 SB3 的话,那是不是电就从这边过来(SB1->SB3->KM1)?
过来 KM2(线圈) 一得电,同样这个常开触点(SB1->KM2),KM2 的常开触点先闭合,闭合的话它辅助的主触点 KM2 也闭合,闭合的话它就把这个 U 和 W 反过来了,U 和 W 反过来之后电机就反转。
同样它。这里常闭(SB2->KM2 辅助触头),常闭的话也变成开,一开的话,再怎么按 SB2 它【KM1线圈】也不会得电,就这意思。
同样我这个热过载的话(FR1),一过载的话它(SB1->KM2 辅助触头)也会停止,即也会断开它的自锁。
24:30
这就是,这就是所谓的互锁,这就是传说中的互锁。
【大家记住】
互锁是用别人的常闭触点锁住,断开自己的;自锁是用自己的常开触点,锁住自己。嗯。就这样子啊。
SB2->KM2 锁住 SB2 水平的 KM1
SB2->KM2 对应KM2 线圈 SB2 水平的 KM1 对应KM1 线圈
25:20
有些电路有急停,我们也可以加急停,是吧?加急停的话这个号码的话也会变的。
急停的话它符号也不同的,画一个画圆形急停的话是长得这模样 SB4,SB1 这个就是普通按钮的画法。FR1 这个是热继电器的画法。
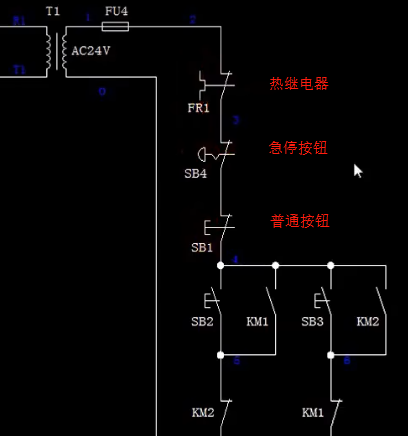
普通按钮、急停按钮、热继电器示例图