2022-2023-2-移动机器人设计与实践-期末A-CSDN博客
本文介绍了《移动机器人设计与实践》课程期末考试试卷B卷的内容与参考答案。试卷包含分析题、设计题、实践题和编程题四部分,总分100分。分析题考察学生对空中、水面和地上三种移动机器人模型运动机制及应用场景的理解;设计题要求设计工业仓储物流机器人并分析路径规划方法;实践题涉及机器人环境搭建与轨迹绘制;编程题则测试传感器数据获取、运动控制和路径跟踪算法的实现能力。参考答案提供了详细解答思路和评分标准,帮助学生理解课程核心内容并应对实践考核。
《移动机器人设计与实践》考试试卷(B卷)
适用班级:1609
试题总分:100 分 考试时限:100分钟 考试形式:开卷
| 题号 | 一 | 二 | 三 | 四 | 总分 | 阅卷人 |
| 得分 |
| 得分 |
一、分析题(本大题共2小题, 每小题10分, 共20分。)
1、简要分析空中、水面和地上三种移动机器人模型差异(侧重如何实现运动角度论述)并对比说明具体应用场景差异。
空中(2分):_______________________________________________________
水面(2分):_______________________________________________________
地上(2分):_______________________________________________________
应用场景差异(4分):_________________________________________________
____________________________________________________________________
2、市场上工业仓储物流机器人采用上述三种模型中哪一种,为何选择这种模型。
物流机器人选择(2分):_______________________________________________
选择此类模型的原因:1.__________________________________________(2分)
2._____________________________________________________________(2分)3._____________________________________________________________(2分)4._____________________________________________________________(2分)
| 得分 |
二、设计题(本大题共2小题, 每小题10分, 共20分。)
- 设计一款工业仓储物流机器人需要考虑哪些因素?(10分)
- 上述机器人如何实现路径规划,提升物流效率需要注意哪些限制?(10分)
| 得分 |
三、实践题(每小题10分, 3题共30分。)
完成后截图放到同一个pdf文档中并标注题号提交
- 从云班课中下载考试专用环境并另存为mobile+个人学号。(10分)
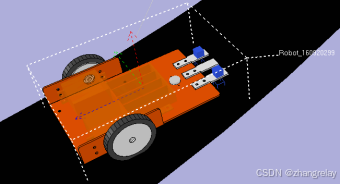
- 在环境中四个赛道选择一个并添加赛道机器人(机器人在行驶过程中不能完全离开黑色赛道),机器人命名为robot+个人学号。(10分)

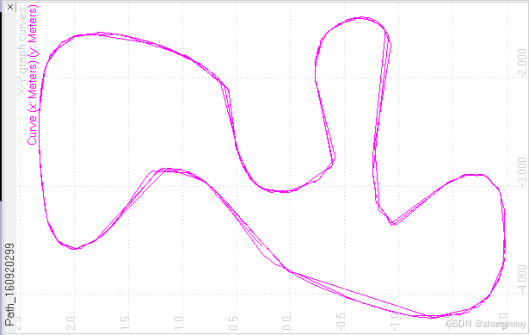
- 在环境中添加机器人轨迹曲线绘制图,图命名为path+个人学号,图背景为白色,轨迹曲线颜色自定义为不同颜色,如果不会,就绘制左轮和右轮速度曲线。(10分)
| 得分 |
- 编程题(每小题10分, 3题共30分。)
提交程序和仿真视频
- 完成第三题准备工作后,机器人获取环境信息的传感器代码。(10分)
- 机器人运动控制如左右轮转速的代码。(10分)
- 机器人完成要求任务如赛道行驶的控制代码。(10分)
如上全部内容完成后,保存到mobile+个人学号。开启仿真并录制机器人完成赛道行驶任务视频,要求必须包含完整的一圈巡线。

第三题和第四题评分表
| 题号 | 分数 | 备注 |
| 3.1 | ||
| 3.2 | ||
| 3.3 | ||
| 4.1 | ||
| 4.2 | ||
| 4.3 |
《移动机器人设计与实践》考试试卷(B卷)参考答案
一、分析题
1、
- 空中(2分):
- 空中移动机器人(如无人机)通过螺旋桨或旋翼产生升力来实现运动。通过调整不同螺旋桨或旋翼的转速,改变升力的大小和方向,从而实现上升、下降、前进、后退、左右平移以及旋转等运动。例如,四旋翼无人机,四个旋翼的转速不同组合可以产生各种方向的运动,通过控制旋翼的相对转速来实现姿态调整和方向改变。
- 水面(2分):
- 水面移动机器人(如无人船)主要通过推进器(如螺旋桨)产生推力来实现运动。推进器可以安装在船体的不同位置,通过改变推进器的转速和方向来控制船的运动。一些无人船还可能采用舵来辅助转向,通过调整舵的角度,改变水流对船体的作用力方向,从而实现更灵活的转向。
- 地上(2分):
- 地上移动机器人(如轮式、履带式机器人)通过轮子或履带与地面的摩擦力来实现运动。轮式机器人通过轮子的转动,履带式机器人通过履带的滚动来前进。对于轮式机器人,可以通过控制不同轮子的转速和转向来实现各种运动,如两轮差动机器人通过左右轮速度差实现转向;履带式机器人则依靠履带的特殊结构,能够在复杂地形上行驶,通过调整两侧履带的速度差实现转向。
- 应用场景差异(4分):
- 空中移动机器人适用于需要快速覆盖大面积区域、对地形障碍物无限制且能够从空中获取信息的场景,如农业植保(快速大面积喷洒农药)、电力巡检(对高压线路进行空中检查)、测绘(获取高精度的地理信息)等。
- 水面移动机器人适用于在水域环境中执行任务,如水质监测(定期采集水样进行水质分析)、海洋资源勘探(寻找海底矿产资源)、水上搜救(在水面搜索失踪人员或船只)等。
- 地上移动机器人适用于在地面环境中执行任务,尤其是对运动精度和负载能力有一定要求的场景,如工业仓储物流(货物搬运和分拣)、服务机器人(在商场、医院等室内场所提供服务)、救援机器人(在灾难现场进行人员搜救和物资运输)等。
2、
- 物流机器人选择(2分):
- 市场上工业仓储物流机器人多采用地上移动机器人模型,如轮式或履带式机器人。
- 选择此类模型的原因:
- 负载能力强(2分):工业仓储物流通常需要搬运较重的货物,地上移动机器人可以通过合理的结构设计,如采用大尺寸的轮子或坚固的履带,以及配备强大的驱动电机,来承受较大的负载,满足物流作业的需求。
- 运动精度高(2分):在仓储环境中,货物的存放和搬运需要较高的精度,地上移动机器人可以通过精确的传感器和控制系统,实现准确的定位和路径跟踪,确保货物能够准确地放置到指定位置。
- 适应复杂地形(2分):仓储环境可能存在不同的地面状况,如平坦的水泥地面、有坡度的地面或一些简单的障碍物,轮式或履带式地上移动机器人能够较好地适应这些地形,保证机器人的正常运行。
- 成本相对较低(2分):与空中和水面移动机器人相比,地上移动机器人的制造和维护成本相对较低,这对于大规模应用于工业仓储物流领域来说,能够有效降低企业的运营成本。
二、设计题
- 设计一款工业仓储物流机器人需要考虑哪些因素?(10分)
- 负载能力:根据仓储物流中货物的重量和体积,确定机器人能够承载的最大负载,确保机器人能够安全、稳定地搬运货物。
- 运动性能:包括机器人的最大速度、加速度、转向半径等参数,要满足仓储作业的效率要求,同时要保证运动的安全性,避免与周围环境和人员发生碰撞。
- 定位与导航:采用合适的定位技术(如激光雷达、视觉定位等)和导航算法(如A*算法、Dijkstra算法等),确保机器人能够在复杂的仓储环境中准确找到货物的存放位置和搬运路径。
- 避障能力:配备可靠的避障传感器(如超声波传感器、红外传感器等),能够及时检测到障碍物并采取相应的避障措施,避免机器人与货物、货架或其他设备发生碰撞。
- 通信能力:机器人需要与仓储管理系统进行实时通信,接收任务指令、上传货物信息和自身状态等信息,确保物流作业的高效协同。
- 电源续航:仓储作业通常需要机器人长时间工作,因此要配备大容量的电池或采用高效的充电方式,确保机器人能够持续完成搬运任务。
- 尺寸与结构:机器人的尺寸要适应仓储货架的间距和通道宽度,结构要坚固耐用,能够承受日常搬运作业中的冲击和振动。
- 操作界面:设计简单易用的操作界面,方便仓库工作人员对机器人进行启动、停止、任务设置等操作。
- 安全性:除了避障能力外,还要考虑机器人的电气安全、机械安全等方面,确保在运行过程中不会对人员和货物造成伤害。
- 成本:在满足功能需求的前提下,要尽可能控制机器人的制造成本,提高产品的市场竞争力。
- 上述机器人如何实现路径规划,提升物流效率需要注意哪些限制?(10分)
- 路径规划实现方法(5分):
- 工业仓储物流机器人通常采用基于地图的路径规划方法。首先,通过激光雷达、视觉传感器等设备构建仓储环境的地图,标记出货架、通道、障碍物等位置信息。
- 然后,根据任务指令和货物的存放位置,使用路径规划算法(如A算法)在地图上搜索从起点到终点的最优路径。A算法通过综合考虑路径的长度和启发式函数(如到终点的直线距离)来选择最优路径。
- 在机器人行驶过程中,根据实时获取的环境信息(如突然出现的障碍物)对路径进行动态调整,确保机器人能够安全、高效地到达目的地。
- 提升物流效率需要注意的限制(5分):
- 环境动态变化:仓储环境可能随时发生变化,如货物的增减、货架的移动等,这会影响路径规划的准确性。机器人需要具备实时更新地图和重新规划路径的能力。
- 多机器人协同:在大型仓储环境中,可能有多台机器人同时工作,需要解决多机器人之间的路径冲突和协同问题,避免机器人相互干扰,提高整体物流效率。
- 路径复杂度:复杂的仓储布局和大量的货架会导致路径规划的复杂度增加,需要优化算法以提高路径规划的速度和准确性。
- 机器人性能限制:机器人的最大速度、加速度和转向半径等性能参数会限制路径的选择,在规划路径时要充分考虑机器人的实际能力。
- 时间限制:物流作业通常有时间要求,如货物的及时配送等,路径规划需要在保证安全的前提下,尽可能缩短机器人的行驶时间,提高物流效率。
- 路径规划实现方法(5分):
三、实践题
(此部分为实践操作题,无具体文字答案,以下为操作步骤参考)
- 从云班课中下载考试专用环境并另存为mobile+个人学号:
- 登录云班课,找到考试专用环境下载链接,下载完成后,在文件保存位置将文件重命名为“mobile+个人学号”。
- 在环境中四个赛道选择一个并添加赛道机器人(机器人在行驶过程中不能完全离开黑色赛道),机器人命名为robot+个人学号:
- 打开下载的环境文件,在界面中选择一个赛道。
- 在机器人添加功能中,选择合适的赛道机器人模型,将其添加到选定的赛道上,并将机器人命名为“robot+个人学号”。
- 通过调整机器人的初始位置和姿态,以及编写控制代码,确保机器人在行驶过程中不会完全离开黑色赛道。
- 在环境中添加机器人轨迹曲线绘制图,图命名为path+个人学号,图背景为白色,轨迹曲线颜色自定义为不同颜色,如果不会,就绘制左轮和右轮速度曲线:
- 在环境设置或数据可视化功能中,找到添加曲线绘制图的选项。
- 创建一个新的曲线绘制图,命名为“path+个人学号”。
- 设置图背景为白色,选择自定义颜色绘制轨迹曲线(如果不会绘制轨迹曲线,则选择绘制左轮和右轮速度曲线)。
- 将机器人位置数据(或左右轮速度数据)与曲线绘制图关联,确保能够实时显示轨迹曲线(或左右轮速度曲线)。
四、编程题
(以下为代码示例参考,具体代码需根据实际环境和编程语言进行调整)
- 机器人获取环境信息的传感器代码(10分):
# 假设使用Python和某种机器人控制库
import robot_library # 假设的机器人控制库class Sensor:def __init__(self):self.robot = robot_library.Robot() # 创建机器人对象def get_track_info(self):# 获取赛道传感器数据(假设机器人有用于检测赛道的传感器)track_data = self.robot.get_track_sensors_data() # 假设的获取赛道传感器数据方法return track_datadef get_position_info(self):# 获取机器人位置信息(如果需要绘制轨迹曲线)position_data = self.robot.get_position_data() # 假设的获取位置数据方法return position_data# 使用示例
sensor = Sensor()
track_info = sensor.get_track_info()
print("赛道传感器数据:", track_info)
# position_info = sensor.get_position_info()
# print("机器人位置信息:", position_info)python
# 假设使用Python和某种机器人控制库 | |
import robot_library # 假设的机器人控制库 | |
class Sensor: | |
def __init__(self): | |
self.robot = robot_library.Robot() # 创建机器人对象 | |
def get_track_info(self): | |
# 获取赛道传感器数据(假设机器人有用于检测赛道的传感器) | |
track_data = self.robot.get_track_sensors_data() # 假设的获取赛道传感器数据方法 | |
return track_data | |
def get_position_info(self): | |
# 获取机器人位置信息(如果需要绘制轨迹曲线) | |
position_data = self.robot.get_position_data() # 假设的获取位置数据方法 | |
return position_data | |
# 使用示例 | |
sensor = Sensor() | |
track_info = sensor.get_track_info() | |
print("赛道传感器数据:", track_info) | |
# position_info = sensor.get_position_info() | |
# print("机器人位置信息:", position_info) |
- 机器人运动控制如左右轮转速的代码(10分):
class MotionControl:def __init__(self, robot):self.robot = robotdef set_wheel_speed(self, left_speed, right_speed):# 设置左右轮转速self.robot.set_left_wheel_speed(left_speed) # 假设的设置左轮速度方法self.robot.set_right_wheel_speed(right_speed) # 假设的设置右轮速度方法# 使用示例
robot = robot_library.Robot()
motion_control = MotionControl(robot)
motion_control.set_wheel_speed(100, 100) # 设置左右轮速度为100(单位根据实际情况)python
class MotionControl: | |
def __init__(self, robot): | |
self.robot = robot | |
def set_wheel_speed(self, left_speed, right_speed): | |
# 设置左右轮转速 | |
self.robot.set_left_wheel_speed(left_speed) # 假设的设置左轮速度方法 | |
self.robot.set_right_wheel_speed(right_speed) # 假设的设置右轮速度方法 | |
# 使用示例 | |
robot = robot_library.Robot() | |
motion_control = MotionControl(robot) | |
motion_control.set_wheel_speed(100, 100) # 设置左右轮速度为100(单位根据实际情况) |
- 机器人完成要求任务如赛道行驶的控制代码(10分):
class TrackFollowing:def __init__(self, robot):self.robot = robotself.sensor = Sensor()self.motion_control = MotionControl(robot)self.Kp = 0.5 # 比例系数self.Ki = 0.1 # 积分系数self.Kd = 0.2 # 微分系数self.last_error = 0self.integral = 0def follow_track(self):while True:track_info = self.sensor.get_track_info()# 假设赛道传感器数据中,中心位置为0,偏差越大表示偏离中心越远error = track_info - 0 # 计算偏差self.integral += error # 积分项derivative = error - self.last_error # 微分项self.last_error = error# PID计算控制量(左右轮速度差)control = self.Kp * error + self.Ki * self.integral + self.Kd * derivative# 设置左右轮速度base_speed = 100 # 基础速度left_speed = base_speed - controlright_speed = base_speed + controlself.motion_control.set_wheel_speed(left_speed, right_speed)# 可以添加一些终止条件,例如完成一圈赛道行驶等# if ...:# break# 使用示例
robot = robot_library.Robot()
track_following = TrackFollowing(robot)
track_following.follow_track()python
class TrackFollowing: | |
def __init__(self, robot): | |
self.robot = robot | |
self.sensor = Sensor() | |
self.motion_control = MotionControl(robot) | |
self.Kp = 0.5 # 比例系数 | |
self.Ki = 0.1 # 积分系数 | |
self.Kd = 0.2 # 微分系数 | |
self.last_error = 0 | |
self.integral = 0 | |
def follow_track(self): | |
while True: | |
track_info = self.sensor.get_track_info() | |
# 假设赛道传感器数据中,中心位置为0,偏差越大表示偏离中心越远 | |
error = track_info - 0 # 计算偏差 | |
self.integral += error # 积分项 | |
derivative = error - self.last_error # 微分项 | |
self.last_error = error | |
# PID计算控制量(左右轮速度差) | |
control = self.Kp * error + self.Ki * self.integral + self.Kd * derivative | |
# 设置左右轮速度 | |
base_speed = 100 # 基础速度 | |
left_speed = base_speed - control | |
right_speed = base_speed + control | |
self.motion_control.set_wheel_speed(left_speed, right_speed) | |
# 可以添加一些终止条件,例如完成一圈赛道行驶等 | |
# if ...: | |
# break | |
# 使用示例 | |
robot = robot_library.Robot() | |
track_following = TrackFollowing(robot) | |
track_following.follow_track() |
第三题和第四题评分表
| 题号 | 分数 | 备注 |
|---|---|---|
| 3.1 | 根据实际操作和截图质量评分,截图完整且标注清晰可得满分,否则酌情扣分 | |
| 3.2 | 根据机器人命名、赛道选择和是否完全离开赛道的正确性评分,全部正确可得满分,否则酌情扣分 | |
| 3.3 | 根据曲线绘制图的背景颜色、曲线颜色设置和是否显示轨迹曲线(或左右轮速度曲线)评分,全部符合要求可得满分,否则酌情扣分 | |
| 4.1 | 根据传感器代码的功能完整性、正确性和可读性评分,能够准确获取赛道传感器数据(或位置数据)可得满分,否则酌情扣分 | |
| 4.2 | 根据运动控制代码的功能完整性、正确性和可读性评分,能够准确设置左右轮转速可得满分,否则酌情扣分 | |
| 4.3 | 根据赛道行驶控制代码的功能完整性、正确性和可读性评分,机器人能够完成赛道行驶任务且PID算法应用合理可得满分,否则酌情扣分 |