本文讨论外力作用下的单自由度系统的受迫振动,特别是详细讨论了系统的共振特性。
1. 受迫振动的解及其组成
根据文章1和2的描述,此时简谐力外力 f ( t ) = f 0 sin ( ω t ) f(t) = f_0 \sin(\omega t) f(t)=f0sin(ωt)。因此振动方程为:
m u ¨ ( t ) + c u ˙ ( t ) + k u ( t ) = f 0 sin ( ω t ) ( 5.1 ) m \ddot{u}(t) + c\dot{u}(t) +k u(t) = f_0 \sin(\omega t) \qquad(5.1) mu¨(t)+cu˙(t)+ku(t)=f0sin(ωt)(5.1)
这是一个二阶线性非齐次常微分方程。根据微分方程理论,该方程的解应为对应的齐次方程通解 u ~ ( t ) \widetilde{u}(t) u (t)和非齐次方程的特解 u ∗ ( t ) u^*(t) u∗(t)叠加而成:
u ( t ) = u ~ ( t ) + u ∗ ( t ) ( 5.2 ) u(t) = \widetilde{u}(t) + u^*(t) \qquad(5.2) u(t)=u (t)+u∗(t)(5.2)
式中, u ~ ( t ) \widetilde{u}(t) u (t)和 u ∗ ( t ) u^*(t) u∗(t)分别满足下述方程:
m u ~ ¨ ( t ) + c u ~ ˙ ( t ) + k u ~ ( t ) = 0 ( 5.3 ) m u ¨ ∗ ( t ) + c u ˙ ∗ ( t ) + k u ∗ ( t ) = f 0 sin ( ω t ) ( 5.4 ) \begin{aligned} &m \ddot{\widetilde{u}}(t) + c\dot{\widetilde{u}}(t) +k \widetilde{u}(t) = 0 \qquad(5.3) \\ &m \ddot{u}^*(t) + c\dot{u}^*(t) +k u^*(t) = f_0 \sin(\omega t) \qquad(5.4) \end{aligned} mu ¨(t)+cu ˙(t)+ku (t)=0(5.3)mu¨∗(t)+cu˙∗(t)+ku∗(t)=f0sin(ωt)(5.4)
式(5.3)的通解和(5.4)的特解分别为:
u ~ ( t ) = e − ξ ω n t [ a 1 cos ( ω d t ) + a 2 sin ( ω d t ) ] ( 5.5 ) u ∗ ( t ) = B d sin ( ω t + Ψ d ) ( 5.6 ) \begin{aligned} & \widetilde{u}(t) = \mathrm{e}^{-\xi \omega_{\rm n}t} \left[ a_1 \cos(\omega_{\rm d}t) + a_2 \sin(\omega_{\rm d}t) \right] \quad(5.5) \\ & u^*(t) = B_{\rm d} \sin (\omega t + \Psi_{\rm d}) \end{aligned} \quad(5.6) u (t)=e−ξωnt[a1cos(ωdt)+a2sin(ωdt)](5.5)u∗(t)=Bdsin(ωt+Ψd)(5.6)
将特解带入(5.4),经过一系列数学变换(胡海岩,2005,P20),解出:
B d = f 0 ( k − m ω 2 ) 2 + ( c ω ) 2 , tan Ψ d = − c ω k − m ω 2 ( 5.10 ) B_{\rm d} = \frac{f_0}{\sqrt{(k - m\omega^2)^2 + (c \omega)^2}}, \;\; \tan \Psi_{\rm d} = - \frac{c \omega}{k-m\omega^2} \quad(5.10) Bd=(k−mω2)2+(cω)2f0,tanΨd=−k−mω2cω(5.10)
从而可确定特解(5.6)的表达式。
设初始条件为 u ( 0 ) = u 0 u(0)=u_0 u(0)=u0和 u ˙ ( 0 ) = u ˙ 0 \dot{u}(0) = \dot{u}_0 u˙(0)=u˙0,可确定系数 a 1 , a 2 a_1,a_2 a1,a2:
a 1 = u 0 + 2 ξ ω n 3 ω B 0 ( ω n 2 − ω 2 ) 2 + ( 2 ξ ω n ω ) 2 a 2 = u ˙ 0 + ξ ω n u 0 ω d − ω ω n 2 B 0 [ ( ω n 2 − ω 2 ) 2 − 2 ξ 2 ω n 2 ] ω d [ ( ω n 2 − ω 2 ) 2 + ( 2 ξ ω n ω ) 2 ] ( 5.11 ) \begin{aligned} & a_1 = u_0 + \frac{2 \xi \omega_{\rm n}^3 \omega B_0}{(\omega_{\rm n}^2 - \omega^2)^2 + (2 \xi \omega_{\rm n} \omega)^2} \\ & a_2 = \frac{\dot{u}_0 + \xi \omega_{\rm n} u_0}{\omega_{\rm d}} - \frac{\omega \omega_{\rm n}^2B_0 \left[ (\omega_{\rm n}^2 - \omega^2)^2 - 2 \xi^2 \omega_{\rm n}^2 \right]}{\omega_{\rm d}\left[ (\omega_{\rm n}^2 - \omega^2)^2 + (2 \xi \omega_{\rm n} \omega)^2 \right]} \end{aligned} \qquad (5.11) a1=u0+(ωn2−ω2)2+(2ξωnω)22ξωn3ωB0a2=ωdu˙0+ξωnu0−ωd[(ωn2−ω2)2+(2ξωnω)2]ωωn2B0[(ωn2−ω2)2−2ξ2ωn2](5.11)
式中 B 0 = f 0 / k B_0 = f_0/k B0=f0/k表示静力幅 f 0 f_0 f0作用下的位移。给出参数,可绘制非齐次常微分方程的解式(5.2),图1给出了解的典型曲线,说明了解的构成,胡海岩(2005,P21)给出了该曲线详细的解释。虚线为通解 u ~ ( t ) \widetilde{u}(t) u (t)所描述的瞬态振动,随着时间推移,特解 u ∗ ( t ) u^*(t) u∗(t)所描述的稳态振动仍然不随时间变化,因此时间越久简谐振动越占主导地位,逐渐演变为简谐振动主导的阶段称为过渡过程。
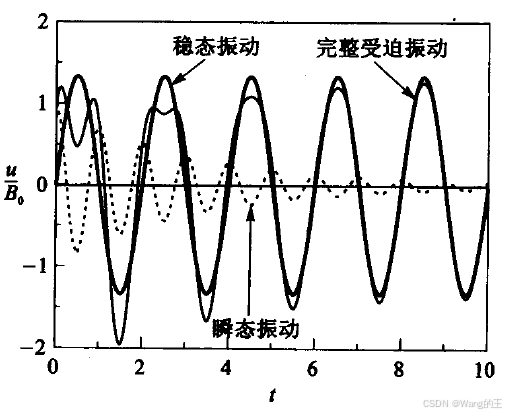
图1 解的构成(虚线为通解 u ~ ( t ) \widetilde{u}(t) u (t),实线之一为特解 u ∗ ( t ) u^*(t) u∗(t)稳态简谐振动)
2. 稳态阶段的幅频特性曲线
由于图1所示的过渡过程时间很短,因此在实际应用中主要关心稳态过程,即振动方程解式(5.2)的特解部分 u ∗ ( t ) u^*(t) u∗(t)。本节引入位移幅频特性曲线、速度幅频特性曲线、加速度幅频特性曲线描述稳态振动。
2.1 位移幅频特性曲线、位移相频特性曲线
定义两个无量纲量,分别称为频率比和位移振幅放大因子:
λ = ω ω n , β d = B d B 0 ( 5.12 ) \lambda = \frac{\omega}{\omega_{\rm n}}, \;\; \beta_{\rm d} = \frac{B_{\rm d}}{B_0} \qquad (5.12) λ=ωnω,βd=B0Bd(5.12)
借助这两个无量纲量,式(5.10)进一步写为:
β d = 1 ( 1 − λ 2 ) 2 + ( 2 ξ λ ) 2 , Ψ d = arctan ( − 2 ξ λ 1 − λ 2 ) ( 5.14 ) \beta_{\rm d} = \frac{1}{\sqrt{(1-\lambda^2)^2 + (2 \xi \lambda)^2}}, \;\; \Psi_{\rm d} = \arctan\left({-\frac{2\xi \lambda}{1-\lambda^2}}\right) \qquad (5.14) βd=(1−λ2)2+(2ξλ)21,Ψd=arctan(−1−λ22ξλ)(5.14)
由式(5.14)可知,振动幅值 β d \beta_{\rm d} βd随外界激励频率 λ \lambda λ的变化可由位移幅频特性曲线 β d \beta_{\rm d} βd- λ \lambda λ描述,初相位 Ψ d \Psi_{\rm d} Ψd随 λ \lambda λ的变化可由位移相频特性曲线 Ψ d \Psi_{\rm d} Ψd- λ \lambda λ描述。
在不同阻尼比 ξ \xi ξ下,可绘制 β d \beta_{\rm d} βd- λ \lambda λ和 Ψ d \Psi_{\rm d} Ψd- λ \lambda λ曲线,如图2所示。
胡海岩(2005,P22)给出了关于 β d \beta_{\rm d} βd- λ \lambda λ和 Ψ d \Psi_{\rm d} Ψd- λ \lambda λ曲线特性详细的描述,例如:(1)对于 β d \beta_{\rm d} βd- λ \lambda λ曲线来说,在 λ = 1 \lambda = 1 λ=1偏左的位置,出现峰值,且阻尼比越小峰值越大;当 λ ≪ 1 \lambda \ll 1 λ≪1时, β d ≈ 1 \beta_{\rm d} \approx 1 βd≈1,表明 B d ≈ B 0 B_{\rm d} \approx B_0 Bd≈B0;当 λ ≫ 1 \lambda \gg 1 λ≫1时, β d ≈ 0 \beta_{\rm d} \approx 0 βd≈0,表明 B d ≈ 0 B_{\rm d} \approx 0 Bd≈0,表明系统此时几乎静止不动。(2)对于 Ψ d \Psi_{\rm d} Ψd- λ \lambda λ曲线来说,在 λ = 1 \lambda = 1 λ=1时,无论阻尼比 ξ \xi ξ如何变化, λ \lambda λ总是等于 − π / 2 -\pi/2 −π/2,即落后于外界激励 π / 2 \pi/2 π/2;阻尼比 ξ \xi ξ非常小时, λ = 1 \lambda = 1 λ=1的左右两侧的相位差几乎为 π \pi π,因此 λ = 1 \lambda=1 λ=1称为反相点;当 ξ = 0.707 \xi = 0.707 ξ=0.707,曲线在 0 < λ < 1 0< \lambda < 1 0<λ<1时接近为直线。
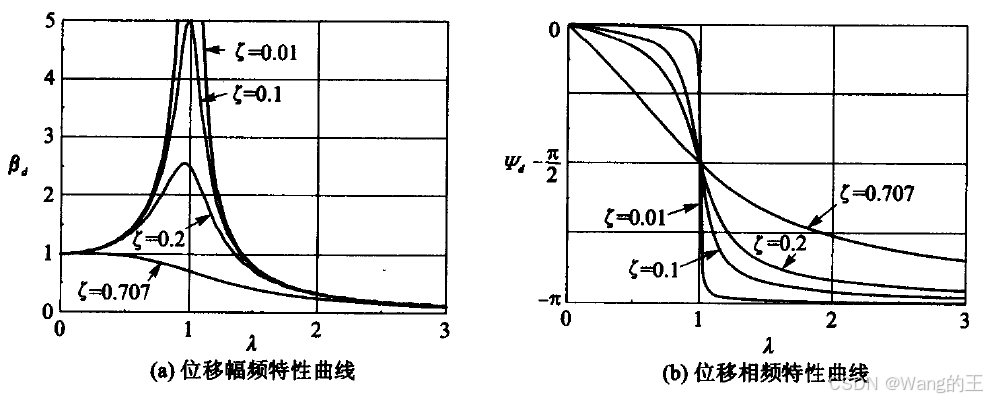
图2 β d \beta_{\rm d} βd- λ \lambda λ和 Ψ d \Psi_{\rm d} Ψd- λ \lambda λ曲线
2.2 速度/加速度幅频特性曲线
类似地,我们也可求得速度幅频特性曲线、加速度幅频特性曲线。求特解(5.6)的时间导数:
u ˙ ∗ ( t ) = ω B d cos ( ω t + Ψ d ) = B v sin ( ω t + Ψ v ) \dot{u}^*(t) = \omega B_{\rm d} \cos(\omega t + \Psi_{\rm d}) = B_{\rm v} \sin(\omega t + \Psi_{\rm v}) u˙∗(t)=ωBdcos(ωt+Ψd)=Bvsin(ωt+Ψv)
定义上式中的 B v = ω B d B_{\rm v} = \omega B_{\rm d} Bv=ωBd, Ψ v = Ψ d + π / 2 \Psi_{\rm v} = \Psi_{\rm d}+\pi/2 Ψv=Ψd+π/2。式(5.14)给出了 B d B_{\rm d} Bd的表达式。速度振幅放大因子定义如下,结合式(5.14):
β v = B v ω n B 0 = λ β d = λ ( 1 − λ 2 ) 2 + ( 2 ξ λ ) 2 ( 5.17 ) \beta_{\rm v} =\frac{B_{\rm v}}{\omega_{\rm n} B_0} = \lambda \beta_{\rm d} = \frac{\lambda}{\sqrt{(1-\lambda^2)^2 + (2 \xi \lambda)^2}} \qquad (5.17) βv=ωnB0Bv=λβd=(1−λ2)2+(2ξλ)2λ(5.17)
这就是速度幅频特性曲线 β v \beta_{\rm v} βv- λ \lambda λ,如图3所示。
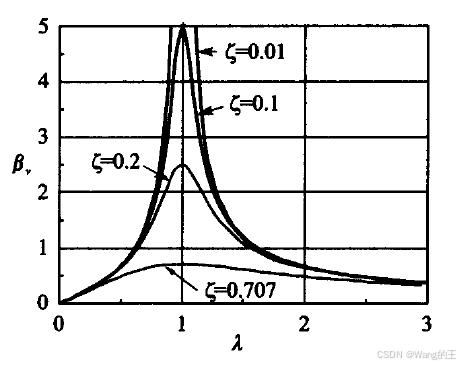
图3 速度幅频特性曲线 β v \beta_{\rm v} βv- λ \lambda λ
类似地,可求出加速度幅频特性曲线,特解的加速度为:
u ∗ ( t ) = − ω 2 B d sin ( ω t + Ψ d ) = B a sin ( ω t + Ψ a ) u^*(t) = -\omega^2 B_{\rm d} \sin(\omega t + \Psi_{\rm d}) = B_{\rm a} \sin(\omega t+\Psi_{\rm a}) u∗(t)=−ω2Bdsin(ωt+Ψd)=Basin(ωt+Ψa)
定义上式中的 B a = − ω 2 B d B_{\rm a} = -\omega^2 B_{\rm d} Ba=−ω2Bd, Ψ a = Ψ d + π \Psi_{\rm a} = \Psi_{\rm d}+\pi Ψa=Ψd+π。式(5.14)给出了 B d B_{\rm d} Bd的表达式。加速度振幅放大因子定义如下:
β a = B a ω n 2 B 0 = λ 2 β d = λ 2 ( 1 − λ 2 ) 2 + ( 2 ξ λ ) 2 ( 5.20 ) \beta_{\rm a} =\frac{B_{\rm a}}{\omega_{\rm n}^2 B_0} = \lambda^2 \beta_{\rm d} = \frac{\lambda^2}{\sqrt{(1-\lambda^2)^2 + (2 \xi \lambda)^2}}\qquad (5.20) βa=ωn2B0Ba=λ2βd=(1−λ2)2+(2ξλ)2λ2(5.20)
这就是加速度幅频特性曲线 β a \beta_{\rm a} βa- λ \lambda λ,如图4所示。
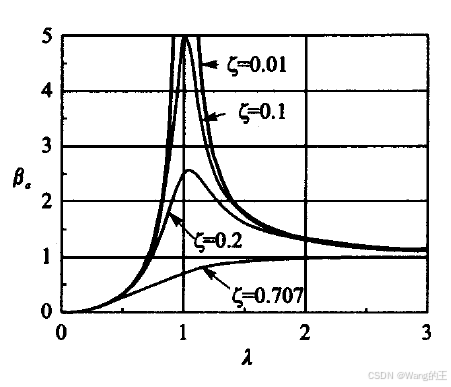
图4 加速度幅频特性曲线 β a \beta_{\rm a} βa- λ \lambda λ
3. 稳态响应的特征
3.1 低频段( 0 < λ ≪ 1 0< \lambda \ll1 0<λ≪1)
由图2a,3,4可知,此时 β d ≈ 1 , β v ≈ 0 , β a ≈ 0 \beta_{\rm d} \approx 1, \beta_{\rm v} \approx 0, \beta_{\rm a} \approx 0 βd≈1,βv≈0,βa≈0,由于 β d = B d / B 0 ≈ 1 \beta_{\rm d} =B_{\rm d}/B_0 \approx 1 βd=Bd/B0≈1,此时可将系统近似视为静态。
稳态振动与外界激励的相位差为 Ψ d ≈ 0 , Ψ d ≈ π / 2 , Ψ a ≈ π \Psi_{\rm d} \approx 0, \Psi_{\rm d} \approx \pi/2,\Psi_{\rm a} \approx \pi Ψd≈0,Ψd≈π/2,Ψa≈π,即稳态振动的位移与外界激励基本同相位。
3.2 高频段( λ ≫ 1 \lambda \gg 1 λ≫1)
由图2a,3,4可知,此时 β d ≈ 0 , β v ≈ 0 , β a ≈ 1 \beta_{\rm d} \approx 0, \beta_{\rm v} \approx 0, \beta_{\rm a} \approx 1 βd≈0,βv≈0,βa≈1。
由于加速度振幅放大因子 β a = B a / ( ω n 2 B 0 ) ≈ 1 \beta_{\rm a} =B_{\rm a}/(\omega_{\rm n}^2 B_0) \approx 1 βa=Ba/(ωn2B0)≈1,此时 B a ≈ ω n 2 B 0 = f 0 / m B_{\rm a} \approx \omega_{\rm n}^2 B_0 = f_0/m Ba≈ωn2B0=f0/m。
稳态振动与外界激励的相位差为 Ψ d ≈ − π , Ψ d ≈ − π / 2 , Ψ a ≈ 0 \Psi_{\rm d} \approx -\pi, \Psi_{\rm d} \approx -\pi/2,\Psi_{\rm a} \approx 0 Ψd≈−π,Ψd≈−π/2,Ψa≈0,可知稳态振动的加速度与外界激励基本同相位。
3.3 共振( λ ≈ 1 \lambda \approx 1 λ≈1)
对于 λ ≈ 1 \lambda \approx 1 λ≈1的情况,尤其是 ξ < 1 / 2 ≈ 0.707 \xi<1/\sqrt{2} \approx 0.707 ξ<1/2≈0.707的欠阻尼系统(关于欠阻尼振动参考文章2《振动力学:有阻尼单自由度系统》),由图2a,3,4可知,此时位移、速度、加速度等量在 λ ≈ 1 \lambda \approx 1 λ≈1附近时(具体而言,发生位移共振、速度共振和加速度共振的 λ \lambda λ值不同,见下述讨论),均会出现极大值,引发系统强烈振动,这种现象称为共振。
对式(5.14a)的位移振幅放大因子求极值,可知位移振幅达到极大值时的频率比为(即发生位移共振的频率比):
λ d = 1 − 2 ξ 2 \lambda_{\rm d} = \sqrt{1-2\xi^2} λd=1−2ξ2
类似地,分别求式(5.17)、(5.20)的极值:可得发生速度共振和加速度共振的频率比:
λ v = 1 λ a = 1 1 − 2 ξ 2 \lambda_{\rm v} = 1 \\ \lambda_{\rm a} = \frac{1}{\sqrt{1-2\xi^2}} λv=1λa=1−2ξ21
一般而言,欠阻尼振动的阻尼比非常小(例如 ξ < 0.2 \xi<0.2 ξ<0.2,胡海岩,2005,P18),因此 λ d , λ v , λ a \lambda_{\rm d},\lambda_{\rm v} ,\lambda_{\rm a} λd,λv,λa的差异也非常小。另一方面,由于 λ v = 1 \lambda_{\rm v} = 1 λv=1,因此速度共振恰好精确地反映了系统的共振特性。
共振时, β d = β v = β a = 1 / ( 2 ξ ) \beta_{\rm d} = \beta_{\rm v} = \beta_{\rm a} = 1/(2\xi) βd=βv=βa=1/(2ξ),从而可知稳态阶段的速度幅值为 B v = β v ω n B 0 ≈ f 0 / c B_{\rm v}= \beta_{\rm v}\omega_{\rm n} B_0 \approx f_0/c Bv=βvωnB0≈f0/c。与外界激励的相位差为 Ψ d ≈ − π / 2 , Ψ d ≈ 0 , Ψ a ≈ π / 2 \Psi_{\rm d} \approx -\pi/2, \Psi_{\rm d} \approx 0,\Psi_{\rm a} \approx \pi/2 Ψd≈−π/2,Ψd≈0,Ψa≈π/2。
Ψ d ≈ 0 \Psi_{\rm d} \approx 0 Ψd≈0 进一步证明了速度共振恰好精确地反映了系统的共振特性,又称为相位共振。
共振对多数工程是有害的,如桥梁、建筑和机械设备等长期处于共振状态下容易产生裂纹甚至断裂;产生刺耳的噪声污染,如高速旋转的发动机、风机叶片在共振时会产生异常声响;产生过大的动载荷,严重影响系统正常工作。但是人们也可利用共振,例如在道路施工机械中,压路机利用共振原理(工作频率接近土壤固有频率)可显著提高压实效率;在矿山机械领域,振动筛通过精确匹配物料固有频率;超声波清洗设备利用共振原理,使清洗液产生空化效应,达到高效清洁目的。
4. 共振的进一步讨论:共振区和系统品质因数
对应于速度振幅放大系数 β v \beta_{\rm v} βv的 1 ∼ 1 / 2 1\sim 1/\sqrt{2} 1∼1/2倍范围的频率比 λ \lambda λ,称为共振区。
无线电学中引入了系统品质因数,来描述共振区宽度和共振的强烈程度:
Q = 1 2 ξ = β d = β v = β a Q = \frac{1}{2\xi} = \beta_{\rm d} = \beta_{\rm v} = \beta_{\rm a} Q=2ξ1=βd=βv=βa
在共振区的两个端点 A , B A,B A,B处的速度振幅放大系数为 Q / 2 Q/\sqrt{2} Q/2。它们对应的系统功率恰好是共振频率对应功率的一半,故称点 A , B A,B A,B为半功率点。可证明,共振区的带宽为 Δ λ = 1 / Q = 2 ξ \Delta \lambda = 1/Q = 2\xi Δλ=1/Q=2ξ。表明,阻尼越小品质因数越高,共振区越窄;反之,阻尼越大品质因数越低,共振区越宽,共振峰越平坦。在实际应用中,如果已知位移幅频特性曲线,可以反求阻尼,即从曲线中可知 Δ λ \Delta \lambda Δλ,于是阻尼 ξ = Δ λ / 2 \xi = \Delta \lambda/2 ξ=Δλ/2。
5. 一个例子
考察一个欠阻尼系统,外界激励的频率与系统固有频率相等,即 ω n = ω \omega_{\rm n} = \omega ωn=ω,初始时刻系统处于平衡位置,求激振力 f 0 cos ( ω t ) f_0 \cos(\omega t) f0cos(ωt)作用下的系统运动。
振动方程为:
m u ¨ ( t ) + c u ˙ ( t ) + k u ( t ) = f 0 cos ( ω n t ) = f 0 sin ( ω n t + π 2 ) m \ddot{u}(t) + c\dot{u}(t) +k u(t) = f_0 \cos(\omega_{\rm n} t) = f_0 \sin(\omega_{\rm n} t + \frac{\pi}{2}) mu¨(t)+cu˙(t)+ku(t)=f0cos(ωnt)=f0sin(ωnt+2π)
通解为式(5.5)(5.6):
u ( t ) = e − ξ ω n t [ a 1 cos ( ω d t ) + a 2 sin ( ω d t ) ] + B d sin ( ω n t + Ψ d + π 2 ) u(t) = \mathrm{e}^{-\xi \omega_{\rm n}t} \left[ a_1 \cos(\omega_{\rm d}t) + a_2 \sin(\omega_{\rm d}t) \right] + B_{\rm d} \sin (\omega_{\rm n} t + \Psi_{\rm d} + \frac{\pi}{2}) u(t)=e−ξωnt[a1cos(ωdt)+a2sin(ωdt)]+Bdsin(ωnt+Ψd+2π)
由前述分析知,在 λ = 1 \lambda = 1 λ=1处 Ψ d = − π / 2 \Psi_{\rm d} = -\pi/2 Ψd=−π/2, B d = f 0 / ( c ω n ) B_{\rm d} = f_0/(c\omega_{\rm n}) Bd=f0/(cωn)。
于是,通解进一步写为:
u ( t ) = e − ξ ω n t [ a 1 cos ( ω d t ) + a 2 sin ( ω d t ) ] + f 0 c ω n sin ( ω n t ) u(t) = \mathrm{e}^{-\xi \omega_{\rm n}t} \left[ a_1 \cos(\omega_{\rm d}t) + a_2 \sin(\omega_{\rm d}t) \right] + \frac{f_0}{c\omega_{\rm n}} \sin (\omega_{\rm n} t) u(t)=e−ξωnt[a1cos(ωdt)+a2sin(ωdt)]+cωnf0sin(ωnt)
系数 a 1 , a 2 a_1,a_2 a1,a2可由初始条件求得,设初始条件为 u ( 0 ) = u 0 u(0)=u_0 u(0)=u0和 u ˙ ( 0 ) = u ˙ 0 \dot{u}(0) = \dot{u}_0 u˙(0)=u˙0(求到的 a 1 , a 2 a_1,a_2 a1,a2表达式略)。另一方面,由于欠阻尼振动 1 − ξ 2 ≈ 1 \sqrt{1-\xi^2} \approx 1 1−ξ2≈1,因此解可化简为:
u ( t ) ≈ f 0 c ω n ( 1 − e − ξ ω n t ) sin ( ω n t ) u(t) \approx \frac{f_0}{c \omega_{\rm n}} \left( 1 - \mathrm{e}^{-\xi \omega_{\rm n}t} \right) \sin(\omega_{\rm n} t) u(t)≈cωnf0(1−e−ξωnt)sin(ωnt)
可根据上式作出振动过程的位移时程曲线。
参考资料
文章1:振动力学:无阻尼单自由度系统
文章2:振动力学:有阻尼单自由度系统
胡海岩. 机械振动基础. 北京航空航天大学出版社. 2005