机器人触觉研究获突破 让机器手更“聪明能干”
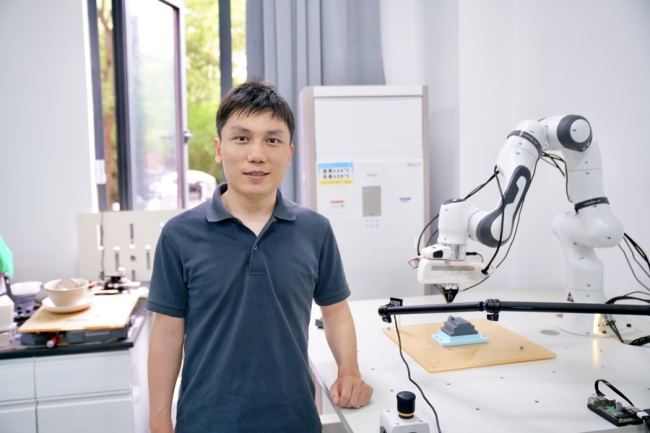
机器人的功能再炫酷,最终还是得能“用”。上海交通大学船舶海洋与建筑工程学院长聘副教授马道林一直致力于解决具身智能发展的难点——触觉,这是机器人能“用”的基础。马道林的研究论文在全球顶级学术会议——国际机器人与自动化大会上获最佳论文奖,从4000多篇参会论文中脱颖而出。他去年5月创立的硬核科技企业——千觉机器人科技(上海)有限公司至今已获得三轮融资,其研发生产的多模态触觉传感器已在国内头部机器人企业应用。马道林团队还正与宁德时代合作,对用机械手装配电池开展概念验证研究,在工业自动化领域已接近产线应用。

横跨学术界和产业界,马道林表示科研一定会有人才、就业、企业合作等溢出效应,希望这种溢出能在自己的祖国发生。一只机器手摸过一排字,立马就能识别出其中含义。这只机器手搭载的是马道林团队自研的千觉G1-WS多模态触觉传感器。这个全球领先的传感器测量分辨率精度达每平方厘米5万个测量点,突破了传统触觉传感器的感知界限,信息感受密度达到人类手指的800倍,使机器手能够灵活地完成毫米级精细操作任务,比如拆开电脑主机装内存条。
人类大脑协同控制手腕、手指,实现精细操作,靠的就是触觉。现在的机器人虽然能完成很多高难度动作,但要像人类一样依靠机器手的触觉将信息反馈给“大脑”,再由“大脑”处理这些信息并指挥机器手精细操作,仍然很难。因此,目前全球工业界只有3%至4%的刚性、规则物品能够由机器人自动生产搬运,剩余96%的柔性、异形、易损物品仍然需要人力完成。按照传统视觉与触觉配合的路径,很难提升机器手完成精细任务的成功率。原因在于,视觉容易被遮挡,而且有视角限制。触觉信息与视觉信息不仅模态不同,信息流特征也有显著差异。视觉获取的信息通常是连贯的,而触觉在与物体接触后只触发局部信号;视觉对物体位置的感知精度基本在毫米级,触觉往往需要微米级。马道林另辟蹊径,提出了“依靠触觉和接触构建空间感知”的机器人精细动作操作路径,“绕过”视觉信息处理,只需要一个多模态触觉处理器就能解析物体的形状、旋转、位移、摩擦、滑动等多模态信息的综合处理,从而实现对力度和位置的精细化控制。

选择研究机器人触觉是马道林在美国麻省理工学院Mcube实验室从事博士后研究时就定下的目标。2021年,马道林回国,在上海交大创立了操作感知与智能实验室(MPI Lab),带着一群年轻人共同开展机器人触觉领域前沿研究。团队的核心人员平均年龄不超过30岁。他们在实验室中的科研突破可以到产业中验证,也可以依托产业,对已落地技术进行更前瞻的挖掘和研究,形成产学研用的良性循环。马道林不仅研发出了全球领先的触觉传感器,还开发了全球首个能精确模拟切向运动和切向力的触觉仿真工具Xense_Sim。用这个仿真工具收集的触觉数据参与对具身智能大模型的训练,再把大模型部署到机器人上,可以让机器人变得更聪明能干。团队还影响了一批本科生投身科研。船建学院2022级强基班本科生丁阳晖正是因为马道林的科研分享,对机器人研究产生了兴趣。去年,丁阳晖的研究课题《面向柔性体感知的触觉伺服研究》获国家自然科学基金青年学生基础研究项目资助。马道林带教班级中还有4名本科生根据各自科研项目撰写的论文进入投稿或审稿状态,其中包括中科院一区杂志。随着AI迅速发展,机器人硬件控制将迅速迭代,具身智能领域将取得巨大发展,实际应用场景即将到来,也期待为这些场景的实现作贡献。

相关文章

男子偷3包槟榔被店主怒追十几条街!

中方恢复日本水产品进口 外交部回应 基于科学证据和审慎研究
刚刚,中国人又喝出一个IPO:if椰子水上市了

美国直升机空中撒下大量美元 遗愿实现引发热议

中纪委周末打虎:59岁省委常委被查 海南反腐风暴持续
特斯拉没牌打了 Robotaxi成最后希望

榕江款物捐赠联系人称不缺物资了 家园重建待客来

北京90岁老人被养女殴打 法院这样做
很多病都是“撑”出来的!正确保持“饥饿感”有助于延长寿命

歼-20成为战斗警巡东海重要力量:我们肯定不能退让!

演员管乐在社交媒体直播中首次正面回应与王皓分手传闻


贵州榕江7小时前后变化!

非法医美培训乱象 零基础速成班背后的隐患

男子被路过的40多名公交司机救了 40多名公交司机一起出手救人

美军打击伊核设施效果再遭质疑,白宫和五角大楼都急眼了 伊朗官员称破坏小于预期

白象说到做到面饼120克上市 透明化回应消费者关切

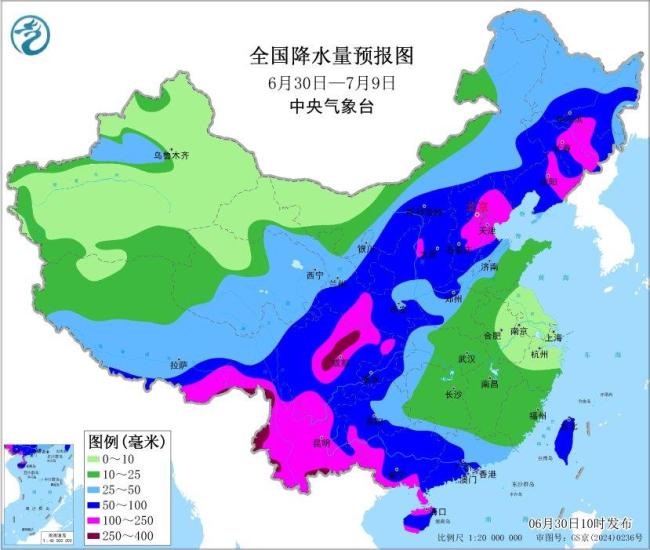
未来十天华北东北及四川盆地多降雨 局地暴雨频发
