作者:vivo 互联网前端团队- Su Ning
本文通过depth-anything获取图片的深度图,同时基于pixi.js,通过着色器编程,实现了通过深度图驱动的伪3D效果。该方案支持鼠标/手势与手机陀螺仪双模式交互,在保证性能的同时,为不同终端用户提供沉浸式的视觉体验。
本文提供配套演示代码,可下载体验:
Github | vivo-parallax
一、引言
在当今的网页设计与交互中,3D 效果能极大地提升用户的视觉体验和沉浸感。但是3D的物料设计成本依然很高,不仅需要专门的设计师掌握专业的建模工具,而且高精度模型带来的渲染压力也使移动端适配变得困难。
在这样的背景下,利用2D图片实现伪3D的效果,就展现出独特的价值。开发者能以极低的资源消耗,在常规图片素材上构建出具有空间纵深的交互效果。这种技术路径不仅规避了传统3D内容生产的复杂性,同时实现了视觉效果与性能消耗的平衡。

二、实现思路
相比二维平面,三维物体多了一个 z 轴作为深度信息。要让 2D 平面呈现 3D 纵深感,关键在于随着视角偏移时,画面中的物体产生不同程度的位移,从而营造前后视差,实现伪 3D 效果。

为此,我们可以通过深度图来获取图片的深度信息,根据这些信息对图片进行分层。当视角改变时,通过调整不同层的偏移来实现视差效果。
三、获取深度图
在前端获取深度图可以借助现有的预训练模型。例如使用 @huggingface/transformers 库,指定任务类型为 ‘depth-estimation’,并选择合适的预训练模型,目前的深度图推理模型尺寸普遍比较大,综合效果和模型尺寸最终选择了 ‘Xenova/depth-anything-small-hf’,量化后的模型尺寸为27.5mb。
import { pipeline } from '@huggingface/transformers';
export async function depthEstimator(url) {const depth_estimator = await pipeline('depth-estimation', 'Xenova/depth-anything-small-hf');const output = await depth_estimator(url);const blob=await output.depth.toBlob()return URL.createObjectURL(blob)
}
四、视差效果的实现
若想借助深度图实现图片分层,可依据深度区间进行划分。假设深度图中纯白的色值为 0,纯黑色值为 1,若将图片切分为两层,那么第一层的色值范围为 0 - 0.5,第二层则是 0.5 - 1。为使画面过渡更自然,可适当增加分层的数量。当镜头偏移时,层数越小的图片位移幅度越大,层数越大的图片位移幅度越小,借此便能实现视差效果。
然而,简单的分层会引发一个问题:不同层的位移可能导致上层的部分区域遮挡背景图案,而另一侧则会出现空白。

针对空白部分,可采用光线步进算法进行颜色采样。
在此,我们选用 Pixi.js 来实现这一效果。作为一款轻量级的 2D 渲染引擎,Pixi.js 在跨平台 2D 动画、游戏及图形界面开发领域表现出色。其精灵支持自定义渲染管线,通过定制图片片段着色器,能够轻松实现视差效果。
4.1 光线步进算法(Ray Marching)
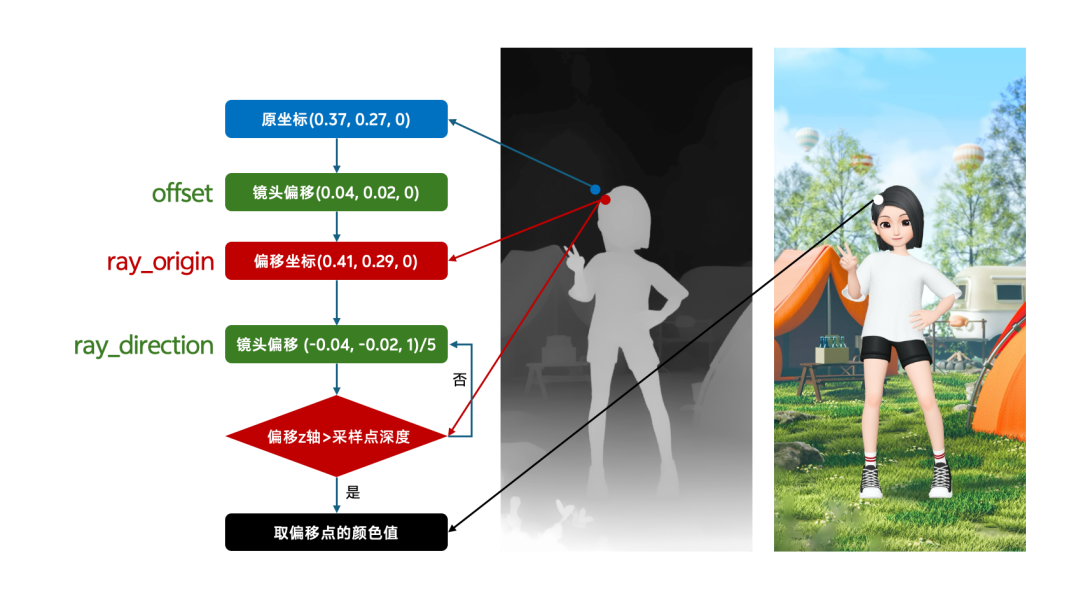
首先我们获取到需要采样颜色的坐标ray_origin,并根据用户的交互事件(鼠标,触摸,陀螺仪)增加镜头偏移offset。得到光线发射的起始坐标。
设置采样步数step,设置光线的偏移向量ray_direction,每一步将光线增加ray_direction/step的坐标。获取到当前深度图坐标的深度信息,由于颜色越浅数值越大,要对深度值进行反转,比对此时光线的z轴是否大于深度的反转值,如果满足条件则挑出循环,取此时光线坐标图片的颜色。
由于每一步增加的偏移值可能跨度比较大,即使满足z轴大于深度反转值的条件,但是二者值的差距依然过大,我们还需要做一个二分搜索来优化采样结果。即偏移值大于深度值,但二者的差值大于阈值的时候,回退一步光线,并将步进值再除以2,可以显著提升采样的精度。
代码实现
varying vec2 vTextureCoord;
uniform sampler2D depthMap;
uniform sampler2D uSampler;
uniform vec3 offset;
const float enlarge = 1.06;vec3 perspective(vec2 uv) {const int step_count = 5;vec3 ray_origin = vec3(uv - 0.5, 0);ray_origin.xy -= offset.xy;vec3 ray_direction = vec3(0, 0, 1);ray_direction.xy += offset.xy;ray_direction /= float(step_count);const float hit_threshold = 0.01;vec4 color = vec4(0.0);for (int i = 0; i < step_count; i++) {ray_origin += ray_direction;float scene_z = 1.0 - texture2D(depthMap, ray_origin.xy + 0.5).x;if (ray_origin.z > scene_z) {if (ray_origin.z - scene_z < hit_threshold) {break;}ray_origin -= ray_direction;ray_direction /= 2.0;}}color = texture2D(uSampler, ray_origin.xy + 0.5);return color.rgb;
}void main(void ) {vec2 uv = (vTextureCoord - vec2(0.5)) / vec2(enlarge) + vec2(0.5);gl_FragColor = vec4(perspective(uv),1.0);
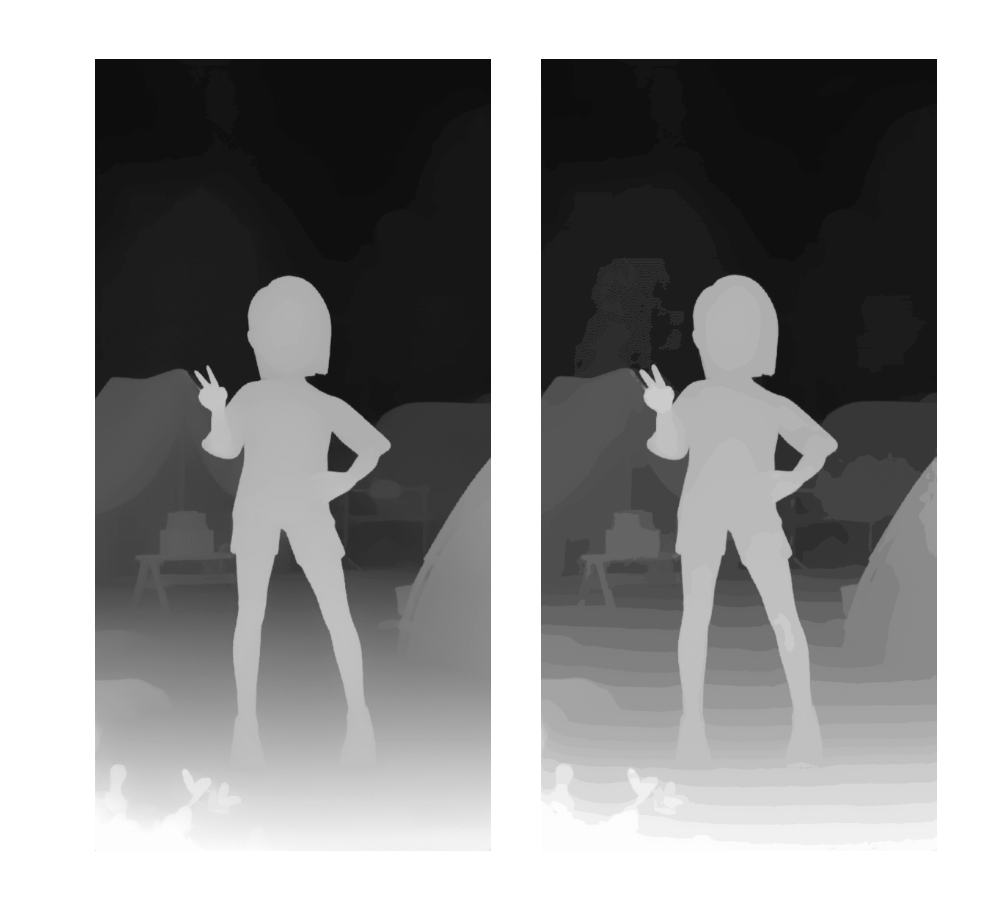
}五、深度图膨胀
边缘膨胀操作主要用于处理深度图,通过对每个像素邻域内的深度值进行分析和处理,增强图像的边缘,可以使视差图的边缘更加平滑。这里使用一个简单的膨胀函数实现。
varying vec2 vFilterCoord;
varying vec2 vTextureCoord;
uniform float widthPx;
uniform float heightPx;
uniform float dilation;
uniform sampler2D uSampler;
const int MAX_RADIUS = 10;float dilate(vec2 uv, vec2 px) {float maxValue = 0.0;float minValue = 1.0;for (int x = -MAX\_RADIUS; x <= +MAX_RADIUS; x++) {for (int y = -MAX\_RADIUS; y <= +MAX_RADIUS; y++) {vec2 offset = vec2(float(x), float(y));if (length(offset) > float(MAX_RADIUS)) continue;offset *= px;vec2 uv2 = uv + offset;float val = texture2D(uSampler, uv2).x;maxValue = max(val, maxValue);minValue = min(val, minValue);}}return dilation < 0.0? minValue: maxValue;
}void main(void ) {const float dilationScale = 1.26;float dilationStep = abs(dilationScale * dilation) / float(MAX_RADIUS);float aspect = widthPx / heightPx;vec2 px =widthPx > heightPx? vec2(dilationStep / aspect, dilationStep): vec2(dilationStep, dilationStep * aspect);gl_FragColor = vec4(vec3(dilate(vTextureCoord, px)), 1.0);}六、总结
综上所述,我们先利用预训练模型生成图片的深度图,再借助 Pixi.js 与光线步进算法达成视差效果,最终通过对深度图进行膨胀处理,实现边缘的平滑过渡。
通过上面的操作,我们成功实现了图片的伪 3D 效果,为用户带来了更具沉浸感的视觉体验。
在实际应用过程中,我们观察到,当视角偏移幅度过大时画面会出现采样失真现象。为解决这一问题,后续可考虑采用动态调整光线步进参数的方法,根据视角变化实时优化光线传播路径,从而减少采样误差;或者引入屏幕空间遮挡关系,通过精准模拟物体间的遮挡效果,增强画面的真实感与层次感。随着 WebGPU 技术的逐步普及,这一方案还有极大的优化空间。我们可借助计算着色器强大的并行计算能力,对复杂的 3D 计算任务进行高效处理,进一步提升计算性能,为网页端 3D 交互开辟更多可能性,打造更加流畅、逼真的 3D 交互场景。