激光雷达的强度像和距离像在测量过程中可能受到多种误差和噪声的影响,这些因素既包括硬件本身的物理特性,也涉及环境条件和算法处理等外部因素。以下是主要误差类型、噪声来源及其关键影响因素的综合分析:
一、强度像的误差与噪声
- 能量信号抖动
- 激光器噪声:激光发射强度的随机波动会导致强度像的瞬时信号不稳定,表现为能量值的频繁波动。
- 背景散射噪声:大气颗粒(如雨、雾)和光学器件表面(如镜头、滤光片)的背向散射会引入噪声,形成与目标无关的杂散信号。
- 环境光干扰:阳光或其他光源中与激光波长相近的成分可能进入接收器,导致强度像过饱和或信噪比下降。
- 硬件设计缺陷
- 光电探测器噪声:APD(雪崩光电二极管)或SPAD(单光子雪崩二极管)的暗电流和热噪声会降低强度信号的分辨率。
- 光学系统杂散光:非理想光学元件(如未镀膜的镜片)可能引入内部反射,形成鬼像噪声。
- 动态目标干扰
- 运动模糊:高速运动目标(如车辆、行人)在单次扫描周期内的位移可能导致强度信号叠加,形成拖影或模糊。
二、距离像的误差与噪声
- 测距随机误差
- 信号噪声:激光脉冲的发射抖动、接收器的量子效率波动等导致时间差(ToF)测量误差。例如,10米处误差标准差≤2厘米,0.2米处≤3厘米。
- 多径效应:激光在复杂场景中发生多次反射(如玻璃、金属表面),回波信号混叠导致距离计算偏差。
- 混合像素现象:激光束覆盖多个反射率差异大的区域时,测距结果为平均距离而非真实距离。
- 环境因素影响
- 天气条件:雨、雪、雾会吸收或散射激光能量,导致远距离信号衰减(如200米外点云密度仅为摄像头的1/800)。
- 全反射表面:玻璃、水面等高反射率物体导致回波信号过强,可能使测距结果趋向无穷大。
- 温度变化:激光器、光学元件的热胀冷缩会引起焦距偏移和光斑畸变,导致距离误差。
- 系统动态误差
- 车辆运动:在单次扫描周期内,车辆自身的位移可能导致相邻点云的距离偏差(如高速行驶时误差加剧)。
- 帧率限制:激光雷达的帧率(通常低于摄像头)难以捕捉高速移动物体的动态变化,导致时间戳对齐错误。
三、主要影响因素分类
| 因素类型 | 具体表现 | 对强度像的影响 | 对距离像的影响 |
|---|---|---|---|
| 硬件设计 | 激光器稳定性、光学系统校准、探测器灵敏度、电子噪声抑制能力 | 能量信号抖动、噪声基底升高 | 测距精度下降、多径效应加剧 |
| 环境条件 | 天气(雨/雾/雪)、光照强度、目标表面反射率、动态目标 | 信噪比降低、过饱和或盲区 | 信号衰减、多径误差、全反射失效 |
| 算法处理 | 滤波算法(如时间滤波、小波去噪)、数据融合(多传感器校正) | 噪声抑制效果、动态目标分割精度 | 混合像素校正、运动补偿能力 |
| 系统校准 | 温度补偿、光学对准、电子增益调整 | 减少环境光干扰、提升能量一致性 | 降低温度漂移、消除机械振动误差 |
四、典型场景误差案例
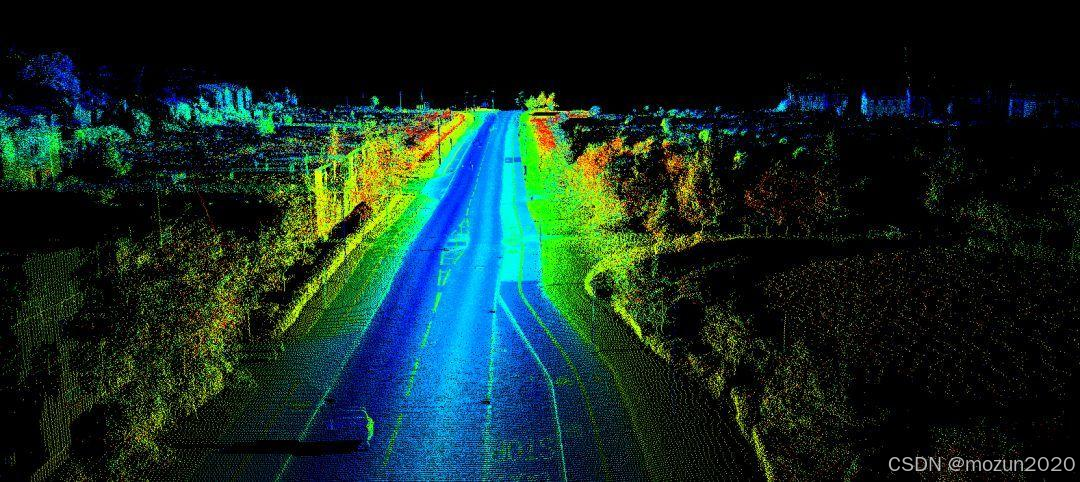
- 远距离测量
- 问题:200米外目标点云密度显著降低,难以区分塑料袋与电瓶车。
- 原因:能量密度随距离平方衰减,多径效应导致信号失真。
- 极端天气
- 问题:雨雾环境下回波噪声呈白噪声分布,需通过滤波算法(如卡尔曼滤波)压制。
- 例外:毫米波雷达穿透性更强,适合恶劣天气冗余。
- 动态目标跟踪
- 问题:高速车辆在低帧率下出现点云拖影,导致轨迹预测误差。
- 解决方案:结合高帧率摄像头数据融合,提升动态目标鲁棒性。
五、误差抑制与校准方法
- 硬件优化
- 激光器稳频技术:采用VCSEL(垂直腔面发射激光器)提升发射稳定性。
- 光学设计:非球面透镜和抗反射涂层减少杂散光。
- 软件算法
- 时间滤波:针对背景噪声,通过脉冲到达时间窗口筛选有效信号。
- 数据融合:结合摄像头、毫米波雷达数据,修正激光雷达的盲区(如玻璃识别)。
- 环境适应性
- 动态温度补偿:实时监测激光器温度并调整发射功率。
- 多模态冗余:在恶劣天气下切换至毫米波雷达主导的感知方案。
六、未来研究方向
- 抗干扰能力提升:开发宽谱抗干扰激光器,降低天气敏感性。
- 高帧率与高分辨率:通过MEMS振镜或固态方案(如速腾聚创M1)提升扫描效率。
- AI驱动的误差修正:利用深度学习模型(如Transformer)预测并补偿动态误差。
总结
激光雷达的强度像和距离像误差是硬件设计、环境条件、算法处理共同作用的结果。实际应用中需通过多传感器融合(如“四巨头”禾赛、速腾、华为、图达通方案)、动态校准和抗干扰算法,平衡性能与成本。未来技术演进将聚焦于提升远距离精度、恶劣天气鲁棒性及与AI的深度结合。