一、YOLOv6 背景与定位
YOLOv6 由美团视觉团队开发,于 2022 年 6 月开源,定位为工业级实时目标检测模型。其设计目标是在精度与速度之间实现更优平衡,尤其针对 GPU 和边缘设备优化,适合工业检测、自动驾驶、安防等场景。相比 YOLOv5(偏向通用开源),YOLOv6 在结构设计、训练策略和部署优化上更具工程化导向。
二、主干网络(Backbone):重参数化与高效架构
1. 核心改进:引入 RepVGG 思想
- YOLOv5:主干采用 CSPDarknet(CSPBlock + Focus 模块 + 跨阶段连接),结构灵活但计算稍冗余。
- YOLOv6:
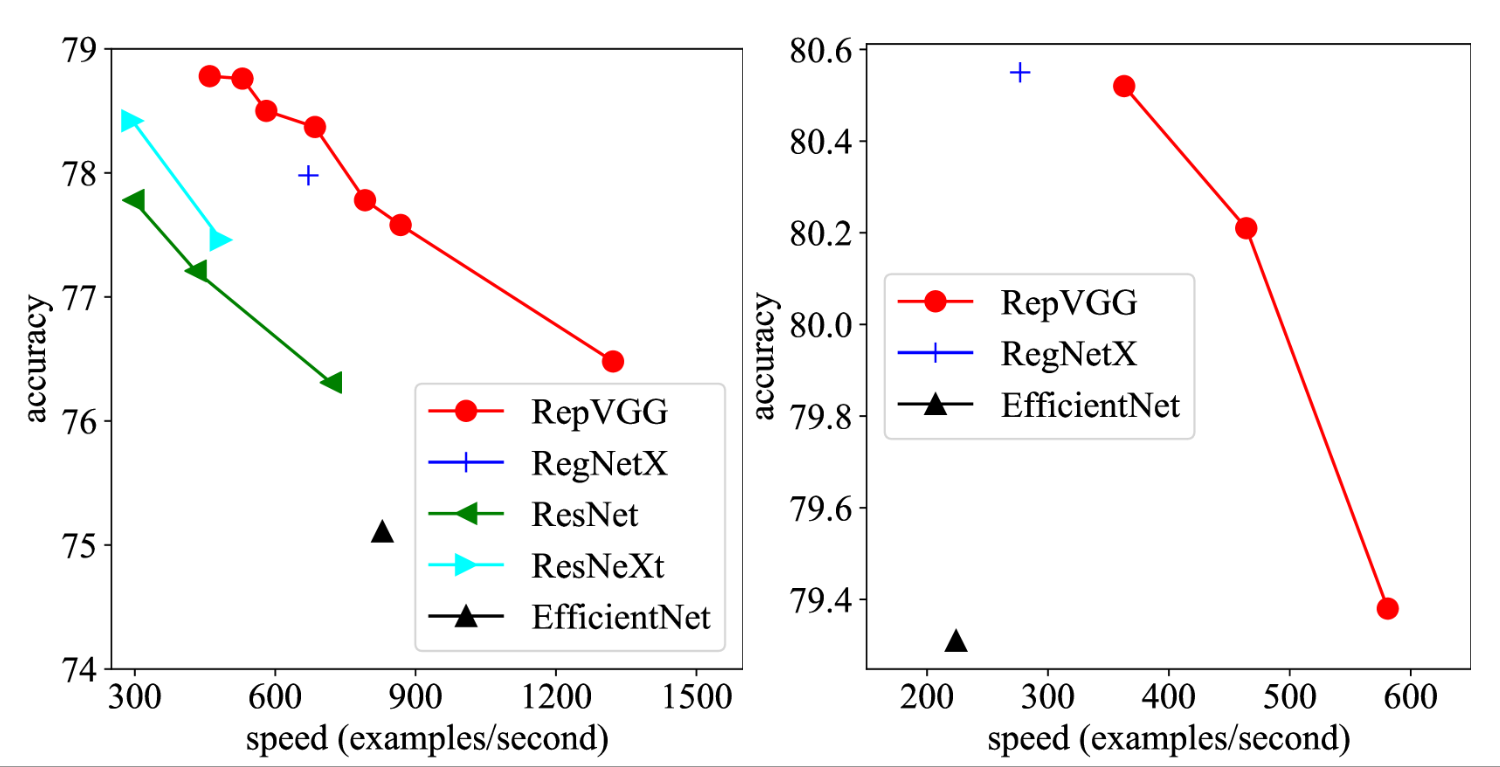
- 主干命名为 RepBackbone,基于 RepVGG 的重参数化(Reparametrization)技术:
- 训练阶段:使用多分支结构(如 3x3 卷积 + 1x1 卷积 + 恒等映射),提升特征表达能力。
- 推理阶段:通过数学等价变换将多分支合并为单路 3x3 卷积,消除分支带来的计算开销,速度提升约 20%,且模型更紧凑。
- 取消 Focus 模块:YOLOv5 的 Focus 通过切片操作降低分辨率,需额外内存访问;YOLOv6 直接使用 Stride=2 的 3x3 卷积下采样,减少计算量和内存占用。
- 主干命名为 RepBackbone,基于 RepVGG 的重参数化(Reparametrization)技术:
2. 模块设计:RepBlock 替代 CSPBlock
- YOLOv5:CSPBlock 通过跨阶段拆分特征图,平衡精度与计算量,但包含较多分支结构。
- YOLOv6:
- 主干中使用 RepBlock(重参数化块),内部由 3x3 卷积、1x1 卷积和恒等分支组成,训练时增强非线性,推理时合并为单路,FLOPs 降低约 15%。
- 下采样方式:采用 RepStage(多个 RepBlock + Stride=2 卷积),替代 YOLOv5 的 CSPDarknet 下采样模块,结构更简洁。
三、颈部网络(Neck):高效特征融合与重参数化
1. 结构升级:PAFPN vs. FPN+PAN
- YOLOv5:颈部为 FPN+PAN(特征金字塔网络 + 路径聚合网络),通过双向特征流动融合多尺度信息,但结构较复杂。
- YOLOv6:
- 颈部命名为 RepPAFPN(重参数化路径聚合特征金字塔网络):
- 基于 PAFPN(YOLOv4 提出的增强版 PAN),但引入 RepBlock 替代部分普通卷积,进一步提升特征融合效率。
- 在横向连接和自底向上路径中使用 RepBlock,推理时合并分支,减少计算耗时,同时保持多尺度特征表达能力。
- 颈部命名为 RepPAFPN(重参数化路径聚合特征金字塔网络):
2. 轻量化设计
- YOLOv6 的颈部层数少于 YOLOv5,且通过重参数化技术在不损失精度的前提下降低计算量。例如,高层特征图(小目标)的融合路径更简洁,减少冗余计算。
四、检测头(Head):无锚框与解耦头优化
1. 取消锚框机制(Anchor-Free)
- YOLOv5:采用锚框(Anchor-Based)设计,需预先设定锚框尺寸,存在超参数敏感、计算冗余等问题。
- YOLOv6:
- 完全转向 无锚框(Anchor-Free),直接预测目标的中心坐标、宽高(类似 YOLOv8、FCOS)。
- 检测头为 EfficientDecoupledHead(高效解耦头):
- 分类分支与回归分支解耦,结构类似 YOLOv5 的解耦头,但更轻量化。
- 每个分支使用 RepBlock 重参数化,推理时合并为单路,速度提升约 10%,同时避免锚框匹配的复杂计算。
2. 输出格式简化
- YOLOv5 的每个检测头输出包含锚框类别、置信度、坐标偏移;YOLOv6 直接输出目标中心点概率、宽高和类别,输出维度减少约 60%(以 3 个锚框为例),降低内存占用和推理耗时。
五、损失函数:质量感知与复合损失
1. 分类损失:VarifocalLoss 替代 BCE
- YOLOv5:分类使用二元交叉熵(BCE Loss),未考虑预测框与真实框的重叠程度。
- YOLOv6:
- 引入 VarifocalLoss(VFL),同时优化分类置信度和定位质量(IoU),公式为:
VFL = − ∑ ( y u log y ^ + ( 1 − y ) log ( 1 − y ^ ) ) ⋅ Quality \text{VFL} = - \sum (y u \log \hat{y} + (1-y) \log(1-\hat{y})) \cdot \text{Quality} VFL=−∑(yulogy^+(1−y)log(1−y^))⋅Quality
其中,( \text{Quality} ) 为预测框与真实框的 IoU,使模型更关注高 IoU 样本的分类,提升整体精度。
- 引入 VarifocalLoss(VFL),同时优化分类置信度和定位质量(IoU),公式为:
2. 回归损失:DIoU Loss 与 Distribution Focal Loss
- YOLOv5:回归使用 GIoU/DIoU Loss,直接优化坐标偏移。
- YOLOv6:
- 主回归损失为 DIoU Loss(考虑中心点距离和长宽比),并结合 Distribution Focal Loss(DFL),将边界框坐标建模为概率分布,提升定位精度(类似 YOLOv8 的 Distribution Loss)。
- 引入 质量预测分支:与分类、回归并行,预测每个预测框的 IoU 分数,用于非极大值抑制(NMS)时的排序,减少低质量框的误检。
六、训练策略:数据增强与优化改进
1. 数据增强:更激进的混合策略
- YOLOv5:使用 Mosaic、MixUp、HSV 增强等。
- YOLOv6:
- 基础增强:Mosaic + MixUp + 高斯模糊 + 随机翻转。
- 新增 SimOTA 动态标签分配:替代 YOLOv5 的静态锚框匹配,根据预测框与真实框的 IoU 动态分配正负样本,提升训练效率和收敛速度。
- EMA(指数移动平均):训练时对模型参数进行平滑,提升模型泛化能力,类似 YOLOv5 但优化了权重更新策略。
2. 优化器与学习率调度
- YOLOv5:默认使用 SGD 或 Adam,学习率调度为余弦退火或阶梯衰减。
- YOLOv6:
- 优化器:默认使用 SGD + Momentum + Weight Decay,针对重参数化模型调整动量参数,避免训练不稳定。
- 学习率策略:采用 CosineAnnealingLR + Warmup,初始学习率更高(如 0.1),配合大批次训练(如 batch size=128),加速收敛。
七、推理优化:工业级部署适配
1. 结构轻量化与计算优化
- 重参数化消除分支:主干、颈部、头部的多分支结构在推理时合并为单路卷积,减少内存访问成本(MAC)和计算分支跳转开销。
- 激活函数简化:YOLOv5 部分模块使用 SiLU,YOLOv6 主要使用 ReLU,降低浮点运算量,且更兼容 INT8 量化。
2. 多框架支持与量化
- YOLOv5:支持 ONNX、TensorRT、OpenVINO 等,但需手动优化。
- YOLOv6:
- 原生支持 TensorRT 动态推理,通过结构设计(如避免动态形状操作)提升引擎优化效率。
- 内置 INT8 量化工具,结合校准数据可实现精度损失极小的量化推理,在 NVIDIA Jetson 等边缘设备上速度提升 2-3 倍。
3. 输入预处理优化
- YOLOv6 采用 动态尺寸缩放(Dynamic Shape),根据图像分辨率自适应调整输入尺寸,减少 YOLOv5 中固定尺寸填充导致的冗余计算(如 letterbox 黑边填充)。
八、模型尺度与性能对比
1. 版本划分
- YOLOv5:n/s/m/l/x 五个版本,侧重通用场景。
- YOLOv6:
- 新增 nano/tiny 轻量级版本,专为嵌入式设备设计(如 ARM CPU),使用更少的 RepBlock 和更窄的通道数。
- 标准版本:s/m/l/x,与 YOLOv5 对标,但在相同算力下精度更高。
2. 性能对比(COCO val2017,NVIDIA Tesla T4)
| 模型 | AP (50-95) | AP50 | FPS | 参数量 (M) | FLOPs (B) |
|---|---|---|---|---|---|
| YOLOv5s | 37.4 | 56.8 | 96 | 7.2 | 16.5 |
| YOLOv6s | 39.2 | 58.7 | 128 | 5.7 | 12.3 |
| YOLOv5m | 45.4 | 63.4 | 49 | 21.2 | 49.0 |
| YOLOv6m | 46.7 | 65.0 | 68 | 15.5 | 35.2 |
- 结论:YOLOv6 在同级别模型中,AP 提升 1-2%,FPS 提升 30-50%,参数量和 FLOPs 显著降低,尤其在 GPU 上优势明显。
九、其他改进点
- 标签分配策略:YOLOv6 使用 TaskAlignedAssigner,根据分类置信度和回归质量联合分配正负样本,替代 YOLOv5 的跨网格匹配(Cross Grid Matching),提升正负样本分配的合理性。
- 测试时增强(TTA):YOLOv6 支持更高效的 TTA 策略(如多尺度翻转测试),在几乎不增加推理耗时的前提下提升小目标检测精度。
- 代码工程化:YOLOv6 的代码库更注重工业部署,集成 TensorRT 推理引擎,提供 Docker 部署镜像和云边端一体化解决方案,而 YOLOv5 更侧重训练灵活性。
十、总结:YOLOv6 的核心优势
| 维度 | YOLOv5 | YOLOv6 |
|---|---|---|
| 速度 | 依赖 CSP 结构,分支较多 | 重参数化单路结构,推理更高效 |
| 精度 | 通用场景优秀,但小目标较弱 | 引入 VarifocalLoss 和质量预测,AP 更高 |
| 部署 | 需要手动优化模型结构 | 原生支持 TensorRT/INT8,即插即用 |
| 工业适配 | 社区导向,灵活性高 | 美团工业级优化,适合量产落地 |
| 锚框机制 | 锚框依赖,超参数敏感 | 无锚框设计,泛化能力更强 |
适用场景:
- YOLOv5:学术研究、快速验证、多场景通用检测。
- YOLOv6:工业质检、实时监控、边缘计算(如机器人、无人机),尤其适合需要高性价比 GPU 部署的场景。
常见误区澄清
- YOLOv6 与 YOLOv8 的关系:两者独立开发,YOLOv8 由 Ultralytics 推出,偏向端到端(含分割/跟踪),而 YOLOv6 专注检测,更侧重工业级速度优化。
- 重参数化的副作用:YOLOv6 的重参数化仅在训练阶段增加计算量,推理时无额外开销,而 YOLOv5 的 CSP 结构在训练和推理中均有分支计算。
- 无锚框的性能影响:YOLOv6 取消锚框后,检测头计算量减少约 60%,且避免了锚框匹配的复杂逻辑,尤其在小目标检测中因无需预设尺寸而表现更优。
不过YOLOv6在业界认可度较低,并未广泛流通和使用…