一、前言
前方车辆碰撞预警系统是前向摄像头和前向毫米波能检测前方目标车辆并计算是否满足报警条件,在危险紧急情况下警告驾驶员采取刹车换道等操作避免碰撞。本文以GB/T 33577记录相关规范要求。
二、术语
碰撞报警 collision warning 系统向驾驶员发出需紧急避碰提醒的信息,在危险情况下发出,警告驾驶人采取刹车换道等操作避免碰撞。
预备碰撞报警 preliminary collision warning 提醒驾驶员前方存在障碍车辆(本车行驶路径中静止运动车辆),危险情况初期发出,驾驶人注意力不集中或前车形式状态改变可能导致碰撞。
目标车辆 target vehicle TV 在自车行驶轨迹线上,距离自车最近的车,包括轿车卡车客车摩托车。目标车辆是前向碰撞预警系统工作时检测的目标。
车头时距 time headway THW两车车间距离除以自车速度。
相对速度 relative velocity 自车车速-目标车辆车速
距离碰撞时间time to collision TTC:车间距离/相对速度
强化距离碰撞时间 enhanced time to collision ETTC 当自车与目标车辆加速度不等,满足
δ_v^2-2δ_a X >0 车速、加速度、车间距条件,用下式计算强化距离碰撞时间
![]()
ETTC除了相对速度外,更加注重加速度因素,当不满足条件或ETTC为负说明不会发生碰撞
报警距离:存在潜在碰撞危险发出报警时刻的距离。
切入车辆:具有横向运动分量向自车行驶轨迹靠近的前方相邻车辆
急动度jerk:加速度变化率,是加速度对时间一阶导,平顺性度量方法
要求减速度 required deceleration能够使自车恰好达到与目标车辆相等的车速,且不发生碰撞要求的最小减速度
![]()
制动报警 braking warning 检测到可能发生追尾碰撞后,短时间内自动施加制动力的方式发出报警
横向偏移量 lateral offset 自车与目标车辆的纵向中线之间的横向距离,以相对于自车宽度百分比为度量单位。
三、系统功能
3.1 系统功能
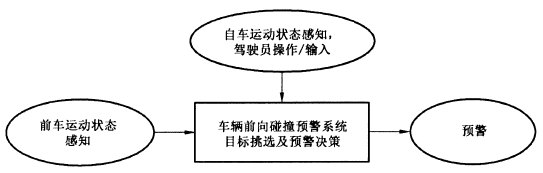
FCWS能检测计算自车与前车的相对距离、相对速度、前车是否位于自车前方运动轨迹上,根据行车危险程度向驾驶员提供报警信息以辅助驾驶员避免碰撞或减轻碰撞。
3.2 工作状态机
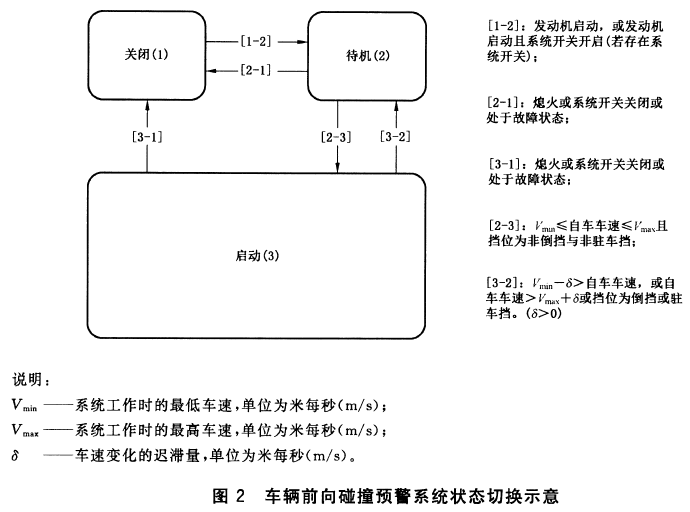
系统关闭指的是点火开关置于关闭状态或者系统检测到故障无法正常工作或系统开关处于关闭状态。系统待机指的是档位非前进挡或工作车速不满足条件。系统启动指车速档位满足条件,如果此时报警条件满足,系统发出报警指示。
工作限制条件:工作时最低车速应不高于11.2m/s,最高车速不低于27.8m/s,相对车速最小值应不高于4.2m/s最大值不低于20m/s。
3.3 报警功能
FCWS通过激光雷达、毫米波雷达、摄像头等可以探测前方障碍车辆相关信息,如车间距离、相对速度,估算TTC。FCWS可以提供预碰撞和碰撞报警。预碰撞是告知前方存在障碍车辆,驾驶人应准备采取必要避碰措施,碰撞预警值应采取必要措施避碰。
3.4 避碰算法
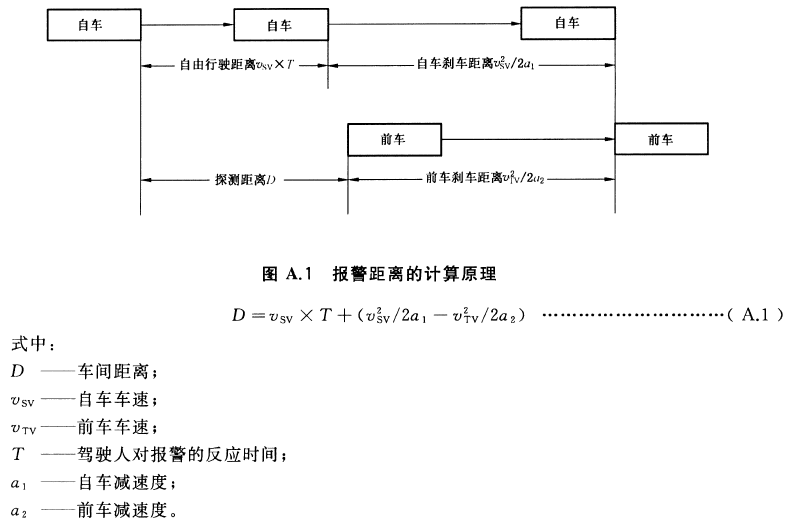
基于前车与本车速度计算报警距离,通过下公式计算报警距离D,并于测量实际距离对比,如果报警距离超过实际距离向驾驶人报警。预碰撞报警和碰撞报警距离根据驾驶人对报警反应时间及车辆减速度进行调整:
3.5 报警因素
- 碰撞报警包括视觉报警、听觉或触觉报警(触觉安全带报警)
- 预碰撞包含视觉和听觉或两者组合报警形式,触觉可以作为补充
- 如果驾驶人正在采取制动操作,建议不采取制动报警形式向驾驶人报警
- 如果自车正在自动制动力,碰撞报警及预碰撞报警可以采取制动报警形式
- 制动报警持续时间不超过1s,产生减速度不超过0.5g,产生车速下降范围不超过2m/s。为保证制动报警有效性满足平均减速度不低于0.1g,持续时间不低于100ms
3.6 减速度阈值
请求减速度a_req超过阈值范围应发出报警;干燥路面a_req应不超过0.68g;
减速度阈值较低时可以发出预备碰撞报警;
碰撞报警及预备碰撞报警的要求减速度阈值可以根据道路条件、环境、驾驶人状态、驾驶人特性及不同驾驶场景调整。
3.7 响应时间
- 报警范围计算中应考虑驾驶人对报警反应时间Tresp不小于0.8s;
- 减速度a_req计算中,应考虑制动系统响应时间Tb,由系统设计者选择
- 当驾驶员正在制动时,对于上述反应时间及制动响应时间应被设置为0
3.8 不报警条件
- 自车减速度大于等于减速度阈值a_req不应发出报警
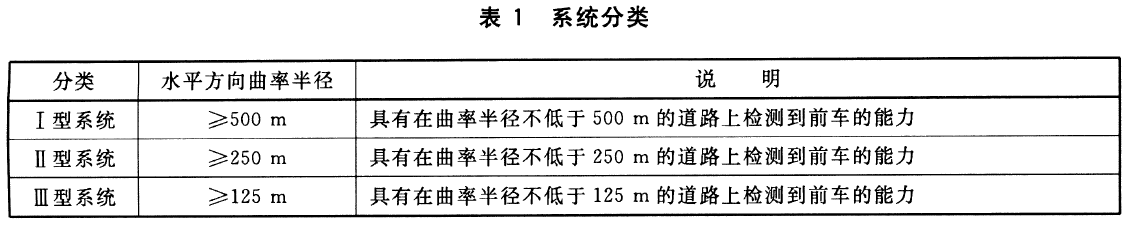
- 满足表1定义曲率半径道路上,不应对不在自车车道内的前车发出报警
- 前车切入自车前方并且车速高于自车不应报警
- 驾驶人正在制动可以抑制或延迟报警
- TTC大于4.0可以抑制或者延迟报警
- 自车正在换道或高动态操纵、自车驾驶员加大油门抑制主动施加的制动力、ACC正在施加最大制动报警可以抑制或延迟报警
- 不满足工作限制条件可以抑制或延迟报警
表1 系统根据道路曲率分类:
3.9 报警距离计算示例
驾驶人反应时间Treq = 0.8s,要求减速度 a_req=6.67m/ss
四、系统性能
4.1检测范围设计
系统最小检测区域
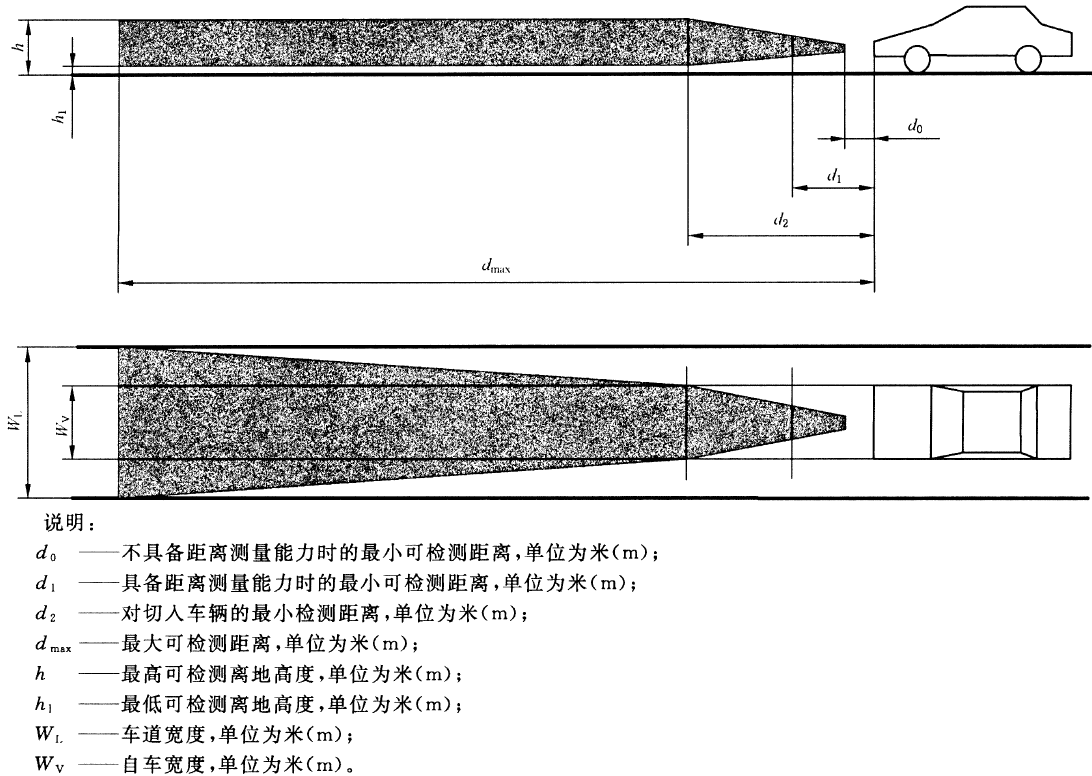
检测距离
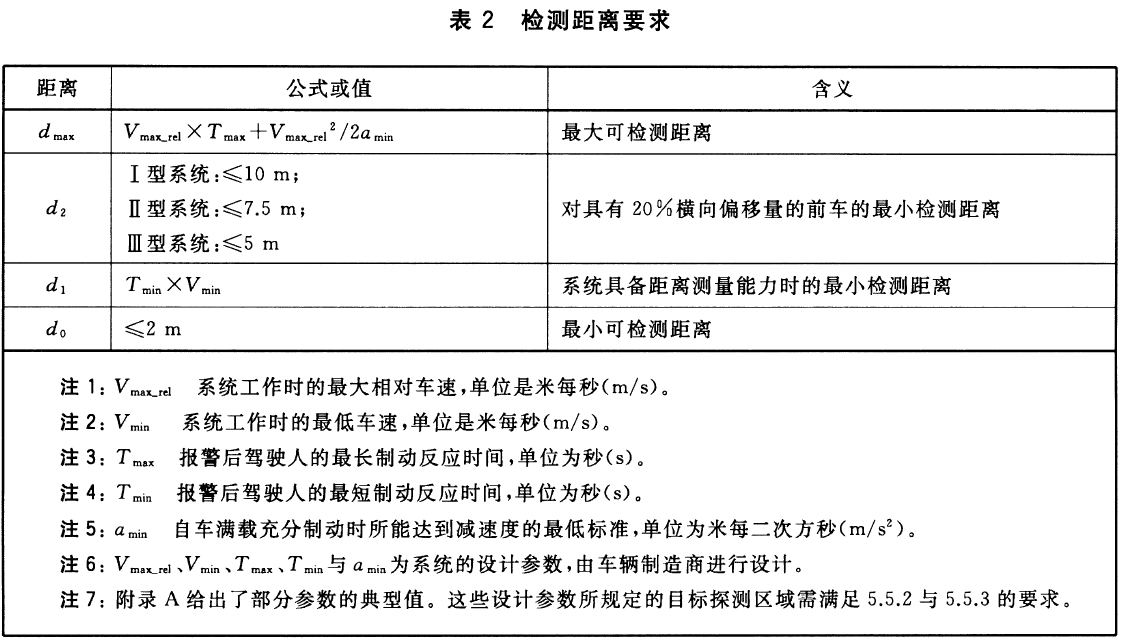
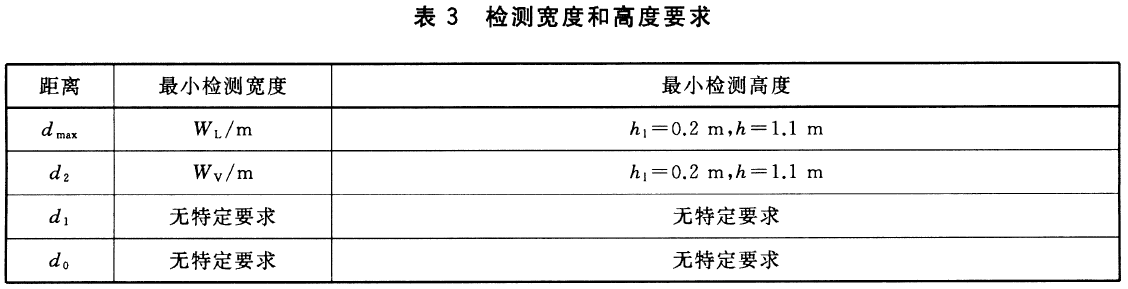
检测宽度和高度
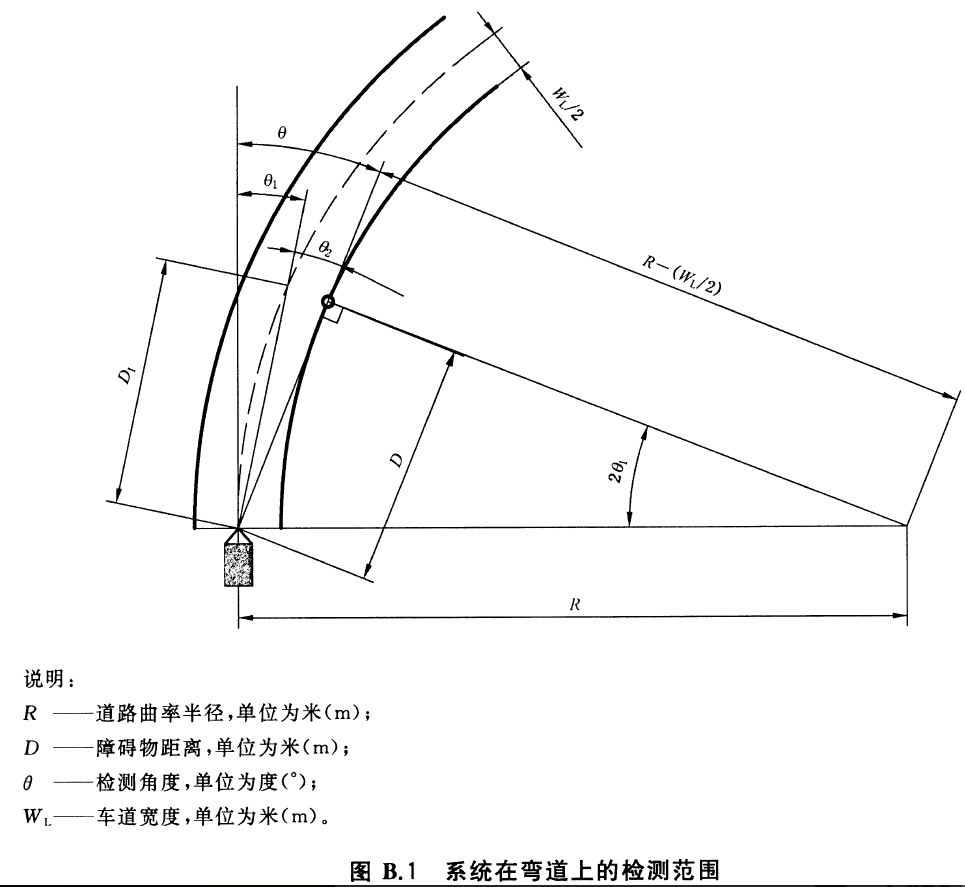
水平弯道检测范围:

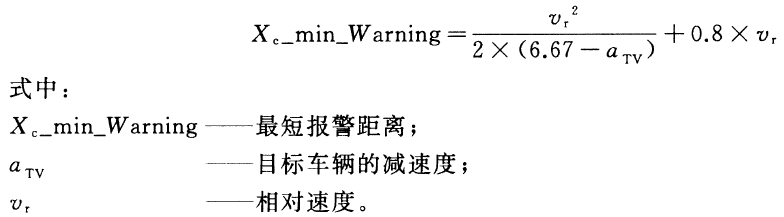
4.2 报警性能
报警距离精度
非自适应系统报警距离应当在+-2m或+-15%范围内。自适应FCWS指系统报警时机不仅取决于自车和目标车辆相对运动状态,还受其他参数影响,如道路条件、环境、驾驶人状态、驾驶场景等,由于工作原理不同,自适应系统性能可以不满足该精度要求。
纵向辨识能力:系统能识别前方检测区域内,自车行驶路径上能最快追上的车辆并进行报警。
侧向辨识能力:自车行驶路径或相邻车道,系统可以选择位于自车行驶路径上的车辆并进行报警。
邻近区域干扰物辨识能力:道路上方、下方如架空交通标识、井盖、减速带等,系统可以排除此类障碍物,不进行报警;
弯道性能要求:I系统对半径大于等于500m弯道障碍车辆进行报警;II型系统对应250m;III型系统对应125m。
五、试验方法
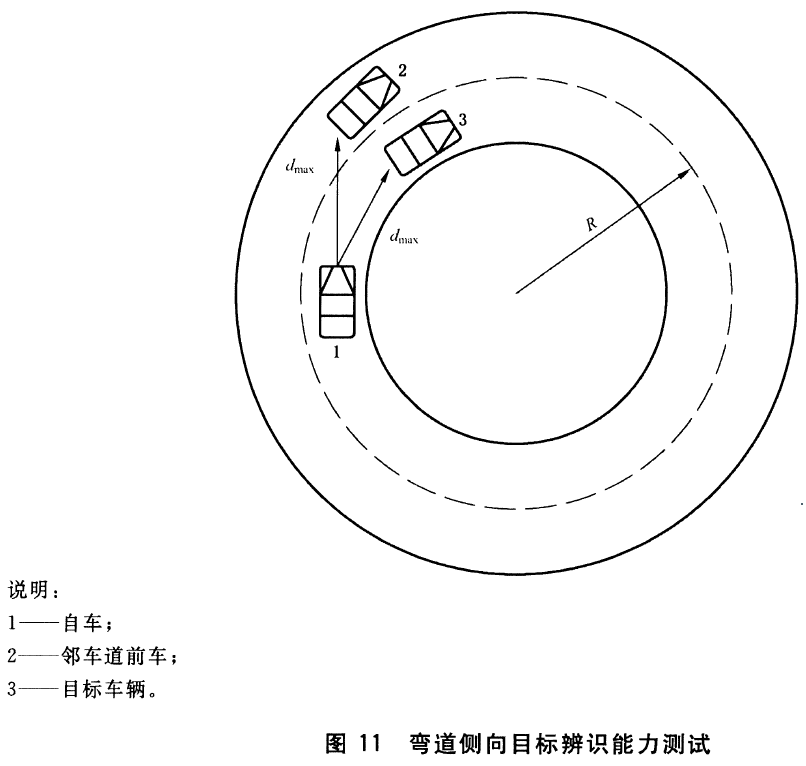
弯道侧向目标识别能力测试:
自车与目标车以相同速度在同一车道内同向行驶,且车间距离不触发报警。
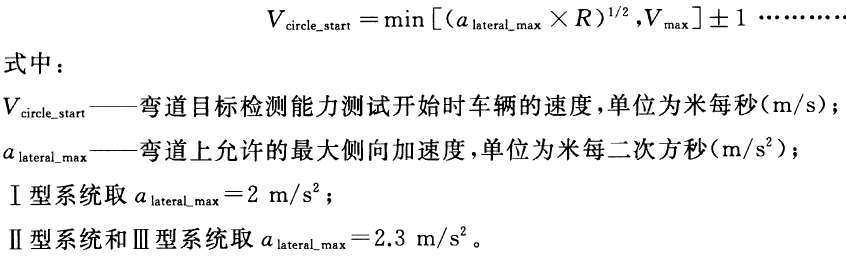
开始测试车辆初始速度设定:
在目标车辆外侧车道内有一辆前车正在行驶。测试开始后,邻车道前车减速至明显低于前车和目标车速度,自车应超过并不触发报警。然后目标车减速后自车发出碰撞预警。