1.开源代码和论文
(1)论文名称:
4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale
Environments based on Pose Graph Optimization
(2)开源代码国内下载地址
https://gitcode.com/gh_mirrors/4d/4DRadarSLAM/?utm_source=artical_gitcode&index=top&type=card&webUrl
2.数据集下载
进入gitcode网站
https://gitcode.com/gh_mirrors/nt/NTU4DRadLM/?utm_source=artical_gitcode&index=top&type=card&webUrl&isLogin=1
然后点超链接 2023年10月22日更新。
下载链接: NTU4DRadLM
进行下载。
3.编译运行
参考博客编译运行:
Ubuntu20.04LTS上运行4Dradar_slam
注意,我的系统是Ubuntu20.04LTS。
主要命令如下:
sudo apt-get install ros-noetic-geodesy ros-noetic-pcl-ros ros-noetic-nmea-msgs ros-noetic-libg2o
并且下载fast_apdgicp、barometer_bmp388、ndt_omp源码,等下catkin_make需要用到。
fast_apdgicp下载: https://github.com/zhuge2333/fast_apdgicp
barometer_bmp388下载: https://github.com/zhuge2333/barometer_bmp388
ndt_omp下载:https://github.com/koide3/ndt_omp
将源码放到catkin_make工程的src目录下。
修改radar_graph_slam.launch文件,
跑有烟雾的包smoke_2022-05-21_0.bag 。
主要要修改rosbag_play_radar_smoke.launch相对路径。
source devel/setup.bash roslaunch radar_graph_slam radar_graph_slam.launch
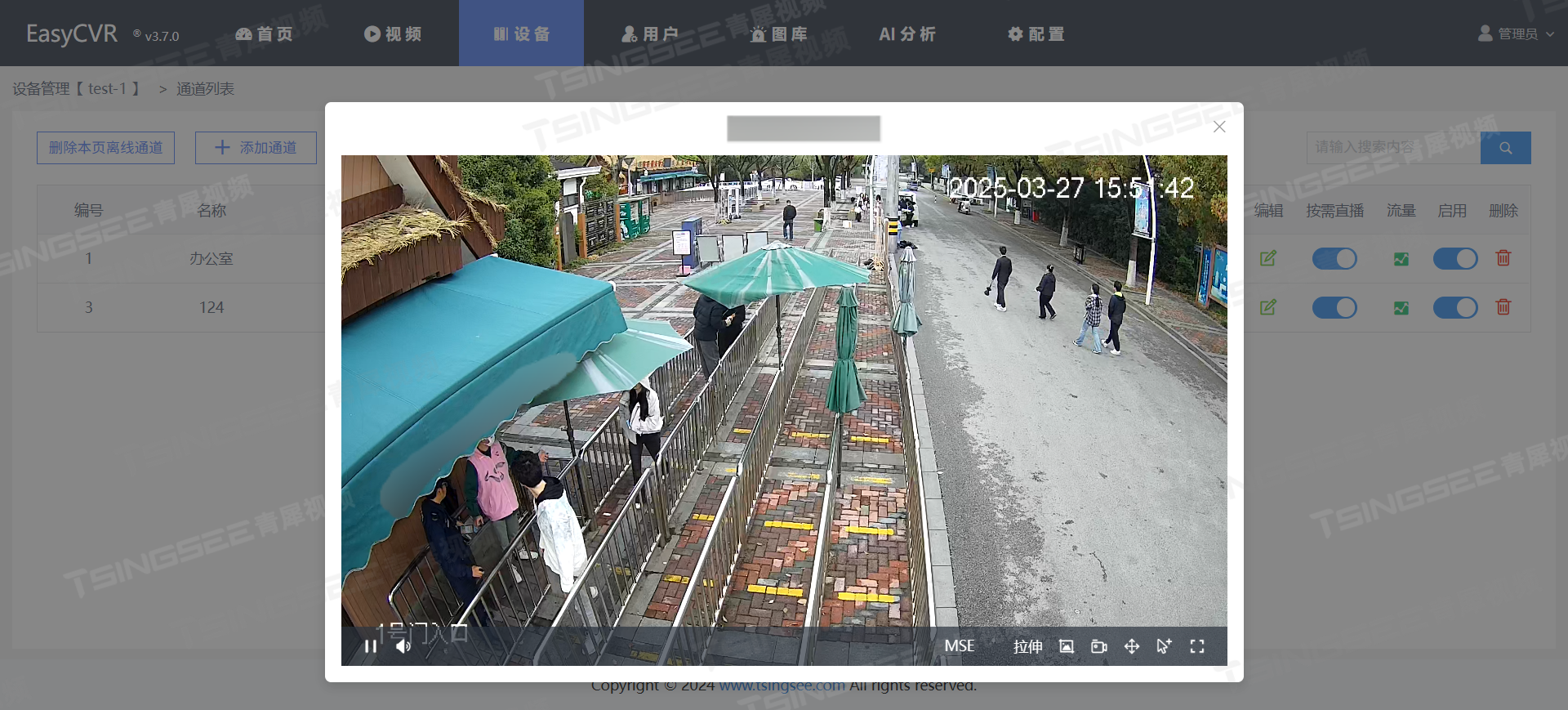
运行效果如下

参考文献
毫米波雷达系列(四):4D毫米波雷达系统方案






![2025年渗透测试面试题总结-匿名[校招]安全研究员(SAST方向)(题目+回答)](https://i-blog.csdnimg.cn/direct/2ea6508e11f348769528e86055da4fc5.png)