文章目录
- 一、Event的定义与作用
- 二、核心数据结构
- 三、重要函数实现与原理
- 1. **事件初始化 `Os_InitEvent()`**
- 2. **设置事件 `SetEvent()`/`Os_SetEvent()`**
- 3. **等待事件 `WaitEvent()`/`Os_WaitEvent()`**
- 4. **清除事件 `ClearEvent()`**
- 5. **获取事件状态 `GetEvent()`**
- 四、应用示例:传感器数据处理流程
- 五、量产车中的典型问题与解决方案
- 六、总结
一、Event的定义与作用
在AUTOSAR Classic Platform(CP)中,**Event(事件)**是一种用于任务间通信的轻量化机制,主要用于协调扩展任务(Extended Task)的执行流程。其核心作用包括:
- 任务同步:允许任务通过事件标志位(Event Mask)实现协作,例如任务A完成数据处理后触发事件,唤醒等待该事件的任务B。
- 状态通知:中断服务程序(ISR)可通过设置事件,通知任务处理异步事件(如传感器数据更新)。
- 条件等待:任务可通过等待特定事件组合(单个或多个事件)进入阻塞状态,直至条件满足时被唤醒。
二、核心数据结构
-
事件控制块
Os_ECBTypetypedef struct {EventMaskType eventSetEvent; // 已设置的事件掩码EventMaskType eventWaitEvent; // 等待的事件掩码boolean eventIsWaitAllEvents; // 是否等待所有事件(TRUE:需全部满足;FALSE:满足任意即可) } Os_ECBType;- 作用:每个扩展任务对应一个事件控制块,记录任务的事件状态(已设置、等待中)和等待策略。
-
事件访问掩码
Os_TaskEventAccessMaskstatic P2CONST(Os_EventMaskRefType, OS_VAR, OS_CONST) Os_TaskEventAccessMask;- 作用:静态配置任务可访问的事件掩码,用于权限检查(如防止任务非法操作其他任务的事件)。
-
全局事件数组
Os_ECB[]- 每个扩展任务对应数组中的一个元素,通过任务ID索引访问。
三、重要函数实现与原理
1. 事件初始化 Os_InitEvent()
FUNC(void, OS_CODE) Os_InitEvent(void) {for (i = 0U; i < CFG_EXTENDED_TASK_MAX; i++) {Os_ECB[i].eventSetEvent = 0U; // 清零已设置事件Os_ECB[i].eventWaitEvent = 0U; // 清零等待事件Os_ECB[i].eventIsWaitAllEvents = FALSE; // 默认等待任意事件}
}
- 原理:
- 初始化所有扩展任务的事件控制块,确保系统启动时无残留事件状态。
- 结合多核配置,通过
Os_SCB.sysCore获取当前核心的扩展任务最大数量(Os_CfgExtendTaskMax)。
2. 设置事件 SetEvent()/Os_SetEvent()
FUNC(StatusType, OS_CODE) Os_SetEvent(TaskType TaskID, EventMaskType Mask) {OS_ARCH_ENTRY_CRITICAL();// 设置事件标志位Os_ECB[TaskID].eventSetEvent |= Mask;// 检查任务是否在等待事件if (Os_TCB[TaskID].taskState == TASK_STATE_WAITING) {if (等待策略为任意事件满足 && (已设置事件 & 等待事件) != 0) ||(等待策略为全部事件满足 && 已设置事件 == 等待事件) {Os_EventTaskDispatch(TaskID); // 唤醒任务并加入就绪队列}}OS_ARCH_EXIT_CRITICAL();return E_OK;
}
- 原理:
- 通过位或操作设置事件标志位(
eventSetEvent |= Mask),支持一次设置多个事件。 - 若目标任务处于等待状态,根据等待策略(
eventIsWaitAllEvents)判断是否唤醒任务:- 任意事件满足:只要
eventSetEvent与eventWaitEvent有交集,即唤醒任务。 - 全部事件满足:仅当
eventSetEvent包含eventWaitEvent的所有位时,唤醒任务。
- 任意事件满足:只要
- 通过位或操作设置事件标志位(
3. 等待事件 WaitEvent()/Os_WaitEvent()
FUNC(StatusType, OS_CODE) Os_WaitEvent(EventMaskType Mask) {OS_ARCH_ENTRY_CRITICAL();// 设置等待事件掩码Os_ECB[当前任务ID].eventWaitEvent = Mask;// 检查事件是否已满足if ((Os_ECB[当前任务ID].eventSetEvent & Mask) == 0) {// 不满足条件,任务进入等待状态Os_TCB[当前任务ID].taskState = TASK_STATE_WAITING;Os_ReadyQueueRemove(当前任务ID); // 从就绪队列移除Os_Dispatch(); // 触发任务调度,执行其他就绪任务}OS_ARCH_EXIT_CRITICAL();return E_OK;
}
- 原理:
- 任务主动设置等待的事件掩码(
eventWaitEvent = Mask),并检查当前已设置事件是否满足条件。 - 若不满足,任务状态转为
TASK_STATE_WAITING,从就绪队列移除,释放CPU资源。 - 当事件满足时(由其他任务或ISR设置),任务被唤醒并重新加入就绪队列。
- 任务主动设置等待的事件掩码(
4. 清除事件 ClearEvent()
FUNC(StatusType, OS_CODE) ClearEvent(EventMaskType Mask) {OS_ARCH_ENTRY_CRITICAL();// 清除已设置事件中的指定位Os_ECB[当前任务ID].eventSetEvent &= (~Mask);OS_ARCH_EXIT_CRITICAL();return E_OK;
}
- 原理:
- 通过位与操作清除事件标志位(
eventSetEvent &= ~Mask),支持一次清除多个事件。 - 仅允许任务清除自身的事件,确保权限隔离。
- 通过位与操作清除事件标志位(
5. 获取事件状态 GetEvent()
FUNC(StatusType, OS_CODE) GetEvent(TaskType TaskID, EventMaskRefType Event) {OS_ARCH_ENTRY_CRITICAL();*Event = Os_ECB[TaskID].eventSetEvent; // 返回已设置的事件掩码OS_ARCH_EXIT_CRITICAL();return E_OK;
}
- 原理:
- 读取任务的
eventSetEvent,用于外部查询任务的事件状态(如调试或监控模块)。
- 读取任务的
四、应用示例:传感器数据处理流程
场景:车载ECU中,中断服务程序(ISR)采集传感器数据后,触发事件唤醒任务进行数据处理。
-
配置阶段
- 定义扩展任务
SensorProcessingTask,配置其可访问的事件掩码为EVENT_SENSOR_DATA_READY。 - ISR配置为在数据采集完成后调用
SetEvent(SensorProcessingTaskID, EVENT_SENSOR_DATA_READY)。
- 定义扩展任务
-
运行阶段
// 传感器处理任务 FUNC(void, OS_TASK) SensorProcessingTask(void) {EventMaskType eventStatus;WaitEvent(EVENT_SENSOR_DATA_READY); // 等待数据就绪事件GetEvent(Os_SCB.sysRunningTaskID, &eventStatus); // 获取事件状态if (eventStatus & EVENT_SENSOR_DATA_READY) {处理传感器数据();ClearEvent(EVENT_SENSOR_DATA_READY); // 清除事件,准备下次处理} }// 传感器ISR FUNC(void, OS_ISR) SensorISR(void) {采集传感器数据();SetEvent(SensorProcessingTaskID, EVENT_SENSOR_DATA_READY); // 触发事件 } -
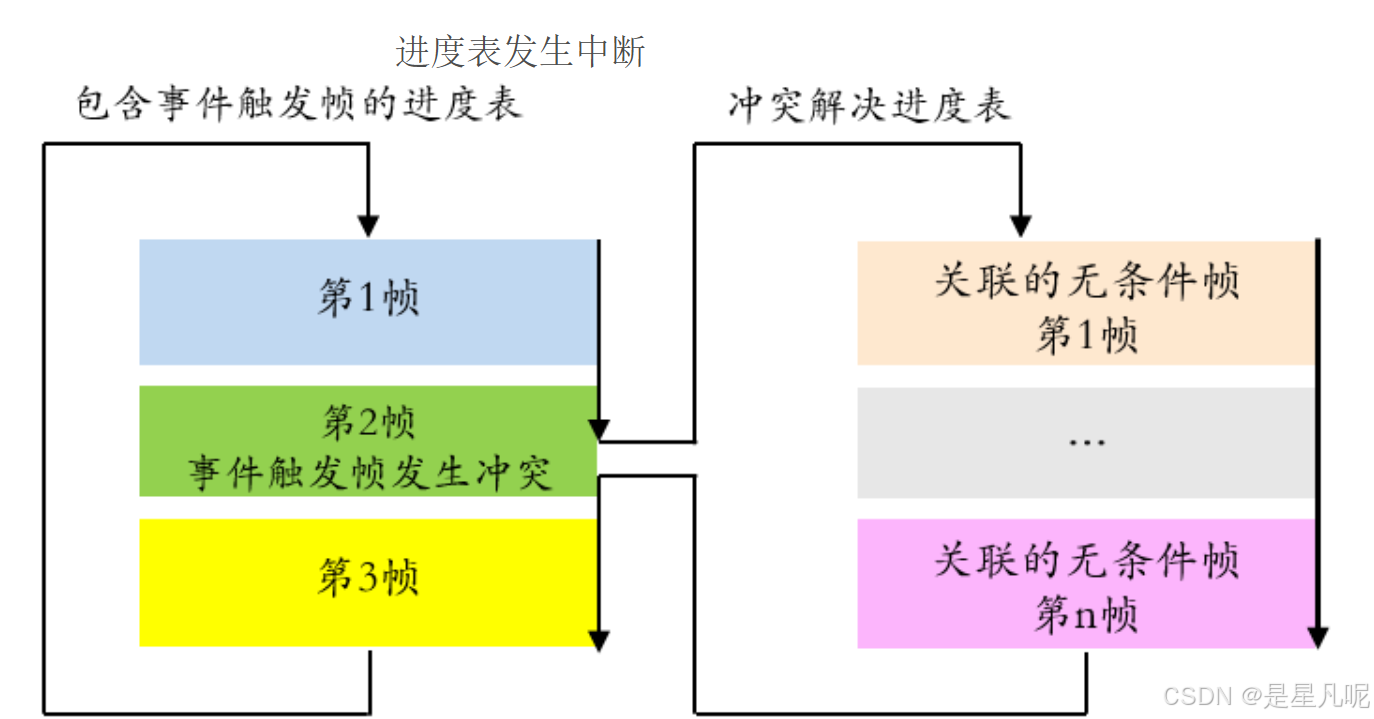
时序控制
- ISR快速完成数据采集后设置事件,避免阻塞其他中断。
- 任务
SensorProcessingTask在事件等待期间释放CPU,确保实时性要求高的任务优先执行。
五、量产车中的典型问题与解决方案
问题1:事件权限控制不足导致非法操作
- 现象:低优先级任务非法设置高优先级任务的事件,导致系统状态混乱。
- 解决方案:
- 通过
Os_TaskEventAccessMask配置任务的事件访问权限,在SetEvent中增加权限检查:err = OS_EVENT_PERMISSION_CHECKING(Mask, *Os_TaskEventAccessMask[TaskID]); - 仅允许任务设置自身或授权的事件,拒绝非法访问。
- 通过
问题2:事件等待超时导致任务饥饿
- 现象:任务因事件未及时设置而长期阻塞,影响系统功能。
- 解决方案:
- 引入超时机制,在
WaitEvent中增加时间参数(如WaitEventTimeout(Mask, timeoutTicks))。 - 结合计数器(Counter)实现超时检测,若超时未触发事件则自动唤醒任务并触发错误处理。
- 引入超时机制,在
问题3:多核环境下事件同步延迟
- 现象:核心A的任务设置事件后,核心B的任务未能及时感知。
- 解决方案:
- 通过共享内存或核间中断(IPI)实现事件状态的跨核心同步。
- 在
SetEvent和GetEvent中增加跨核心通信逻辑(如RPC调用),确保多核视图一致。
六、总结
AUTOSAR OS的事件机制通过位掩码操作和任务状态管理,实现了高效、轻量的任务间同步与通信。其核心优势包括:
- 灵活性:支持单个或多个事件组合等待,适配多样化同步场景。
- 实时性:任务在等待事件时主动释放CPU,避免忙等待导致的资源浪费。
- 安全性:通过静态权限配置和动态访问检查,防止非法事件操作。
在量产应用中,需结合具体场景优化事件设计(如减少事件数量、避免过度依赖事件同步),并通过实时监控和错误处理机制提升系统鲁棒性,确保符合ISO 26262等功能安全标准。

![World of Warcraft Hunter [Grandel] [Ancient Petrified Leaf]](https://i-blog.csdnimg.cn/direct/ff41c528be99473e817e2c808ed62811.png)