文章目录
- 前言
- 一、PTS 技术
- 1、简介
- 2、原理
- 二、MATLAB 仿真
- 1、核心代码
- 2、仿真结果
- 三、资源自取
前言
在 OFDM 雷达通信一体化系统中,信号的传输由多个子载波协同完成,多个载波信号相互叠加形成最终的发射信号。此叠加过程可能导致信号峰值显著高于其均值,从而产生较高的峰值平均功率比(PAPR)。当这些具有高 PAPR 的信号通过非线性设备时,若信号的峰值超出设备的动态范围,就可能引发信号失真,从而影响系统性能。因此,OFDM 雷达通信一体化系统对非线性设备的动态范围提出了较为严格的要求,显著增加了系统建设成本。OFDM 技术所面临的高峰均比问题,已成为其在实际应用中遭遇的主要障碍之一。为了抑制 PAPR,多种技术被提出,本文介绍使用部分传输序列法抑制 OFDM 的 PAPR。
一、PTS 技术
1、简介
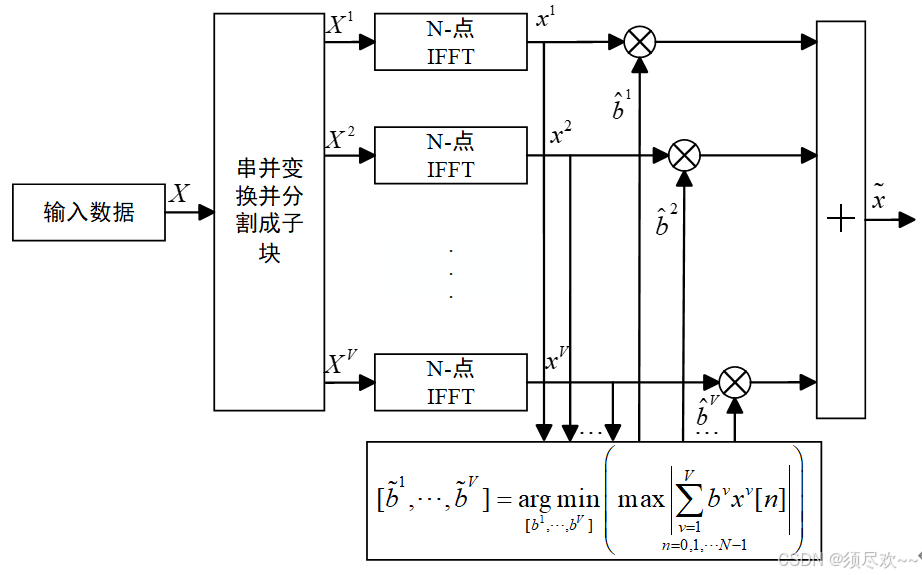
部分传输序列法(Partial Transmit Sequence,PTS)是对选择映射法(SLM)的一种改进方法。与选择映射法相比,PTS显著降低了边带信息的传输量。其基本原理如下:假设OFDM信号选择的子载波总数为 N N N,首先将这 N N N 个子载波分成 V V V 个子块,每个子块包含 N / V N/V N/V 个子载波,并且不同子块之间的数据不重叠。为了使每个子块的长度与总长度 N N N 相匹配,需要在每个子块的对应位置补充零。接着,对每个子块分别进行 IFFT 运算,从而得到 V V V 个不同的 OFDM 信号。然后,这 V V V 个信号与不同的相位因子集进行相位加权,通过遍历搜索找到使得 PAPR 最小的相位因子。选出的最优相位因子与相应的 OFDM 信号相结合,从而得到 PAPR 被有效抑制的传输信号。为了让接收端能够正确解调原始信号,最优相位因子必须与通信数据一同发送到接收端。PTS 算法的工作原理框图如下所示:
2、原理
在上图中,部分传输序列(PTS)技术将包含 N N N 个符号的输入数据块 X X X 划分为 V V V 个互不相交的子块:
X = [ X 1 , X 2 , ⋯ , X V ] T 公式一 X=\left[X^1,X^2,\cdots,X^V\right]^\mathrm{T} \qquad公式一 X=[X1,X2,⋯,XV]T公式一
其中, X i X^{i} Xi 代表连续分布的、具有相同大小的子块。接着对每一个分割后的子数据块乘以一个相应的复相位因子 b ν = e j ϕ ν , ν = 1 , 2 , ⋯ , V b^{\nu}=e^{j\phi\nu},\quad\nu=1,2,\cdots,V bν=ejϕν,ν=1,2,⋯,V,随后经过 IFFT 得到:
x = I F F T ∑V ν = 1 b ν X ν = ∑V ν = 1 b ν ⋅ I F F T { X ν } = ∑V ν = 1 b ν x ν 公式二 x=IFFT\underset{\nu=1}{\operatorname*{\operatorname*{\overset{V}{\operatorname*{\operatorname*{\sum}}}}}}b^\nu X^\nu=\underset{\nu=1}{\operatorname*{\operatorname*{\overset{V}{\operatorname*{\operatorname*{\sum}}}}}}b^\nu\cdot IFFT\{X^\nu\}=\underset{\nu=1}{\operatorname*{\operatorname*{\overset{V}{\operatorname*{\operatorname*{\sum}}}}}}b^\nu x^\nu \qquad公式二 x=IFFTν=1∑VbνXν=ν=1∑Vbν⋅IFFT{Xν}=ν=1∑Vbνxν公式二
其中, { x ν } \{x^{\nu}\} {xν} 为PTS,选择相位向量,使得 PAPR 最小:
[ b ~ 1 , ⋯ , b ~ V ] = arg min [ b 1 , ⋯ , b V ] ( max ∣ ∑ v = 1 V b v x v [ n ] ∣ ) 公式三 [\tilde{b}^1,\cdots,\tilde{b}^V]=\arg\min_{[b^1,\cdots,b^V]}\left(\max\left|\sum_{v=1}^Vb^vx^v[n]\right|\right) \qquad公式三 [b~1,⋯,b~V]=arg[b1,⋯,bV]min(max v=1∑Vbvxv[n] )公式三
这样,最小 PAPR 向量的时域信号可以表示为:
x ~ = ∑ ν = 1 V b ~ ν x ν 公式四 \tilde{\boldsymbol{x}}=\sum_{\nu=1}^{V}\tilde{b}^{\nu}\boldsymbol{x}^{\nu} \qquad公式四 x~=ν=1∑Vb~νxν公式四
为降低复杂度,仅在一个有限的集合中选择相位因子 { b ν } ν = 1 ν \left\{b^\nu\right\}_{\nu=1}^\nu {bν}ν=1ν,因为允许的相位因子集合是 b = { e j 2 π i / W ∣ i = 0 , 1 , ⋯ , W − 1 } \left.b=\left\{\mathrm{e}^{\mathrm{j}2\pi i/W}| \begin{array} {c}i=0,1,\cdots,W-1 \end{array}\right.\right\} b={ej2πi/W∣i=0,1,⋯,W−1},所以应该在 W V − 1 W^{V-1} WV−1 个相位因子集合中搜索最佳的相位因子集合。因此,搜索的复杂度随子块数的增加呈指数上升。对于每一个数据块,PTS技术需要 V V V 次 IFFT 运算和 ⌊ log 2 W V ⌋ \left\lfloor\log_2W^V\right\rfloor ⌊log2WV⌋ 比特的边信息。
PTS 技术的 PAPR 性能不仅受子块数 V V V 和允许的相位因子的影响,而且受子块分割的影响。实际中有三种子块分割方案:相邻、交叉和伪随机方案。在这些方案中,伪随机方案性能最好,下面针对 PTS 技术存在搜索最优相位向量集合时复杂度较高的问题,特别是当子块数增加时,采用二进制相位因子 {-1,1} 的次优化算法降低复杂度,下面为算法的过程:
- 如公式一所示,将输入数据块分为 V V V 个子块;
- 设置所有的相位因子 b v = 1 , v = 1 , 2 , … , V b^v = 1, \quad v = 1, 2, \ldots, V bv=1,v=1,2,…,V,找到公式二中的 PAPR,将其设为PAPR_min;
- 设置 v = 2 v=2 v=2;
- 在 b v = − 1 b^v = -1 bv=−1 的情况下,找到公式二中的 PAPR;
- 如果 PAPR>PAPR_min,那么 b v = 1 b^v = 1 bv=1;否则更新 PAPR=PAPR_min;
- 如果 v < V v<V v<V,那么 v v v 加1,然后回到步骤 4,否则,得到最优的相位因子 b ~ \tilde{b} b~,然后退出程序。
在次优的组合算法中对公式二计算 V V V 次,远小于原来的 PTS 技术所需的计算次数,即 V ≪ W V V \ll W^V V≪WV。
二、MATLAB 仿真
1、核心代码
%PTS算法%PTS算法相关参数V=2;B=[-1 1];ptsseq=ptsseqgen(V,B);for ii2=1:size(ptsseq,1)t_fft_l2=t_fft_l.*kron(ones(1,NBt/V),ptsseq(ii2,:));yt_fft2=yt_fft;yt_fft2(Nf0+NBp+NB+1:Nf0+NBp+NB+NBt) = t_fft_l2 ./ sqrt(2); % 除sqrt(2)是为了保持干扰功率的一致性for m = Nf0+NBp+NB+1 : Nf0+NBp+NB+NBtyt_fft2(Ns+2-m) = conj(yt_fft2(m)); % 为了保证生成的波形是实值信号。end%yt1(ii2,:) = ifft(yt_fft2)*sqrt(Ns); % 一体化波形yt1(ii2,:) = ifft(yt_fft2); % 一体化波形yt1max(ii2)=max(abs(yt1(ii2,:)));end[~,Ind]=min(yt1max);papr(2,ii)=paprcal(yt1(Ind,:));yt=yt1(Ind,:);ptsseq_tmp=kron(ones(1,NBt/V),ptsseq(Ind,:));alfa = max(yt.^2)/10^(PSNRSeq(kk)/10)/mean(whi_n.^2); % 将信号功率除以信噪比和噪声功率,得到放大系数 alfa。这个系数将用于放大噪声信号的功率,以达到指定的信噪比。whi_n_m = whi_n .* sqrt(alfa); % 通过将噪声信号乘以放大系数的平方根,可以将噪声功率放大到与信号功率相匹配的水平,以实现指定的信噪比。y_r = yt + whi_n_m;y_r_fft = fft(y_r);y_r_fft(Nf0+NBp+NB+1:Nf0+NBp+NB+NBt)=y_r_fft(Nf0+NBp+NB+1:Nf0+NBp+NB+NBt)./ptsseq_tmp;yrt = [sign(real(y_r_fft(Nf0+NBp+NB+1:Nf0+NBp+NB+NBt))), sign(imag(y_r_fft(Nf0+NBp+NB+1:Nf0+NBp+NB+NBt)))]; % 将接收的通信部分数据的实部及虚部映射到[-1,1]的区间后再进行拼接bertmp(2,ii) = mean(yrt(:)~= yft(:)); % 累加计算误码率数量
2、仿真结果
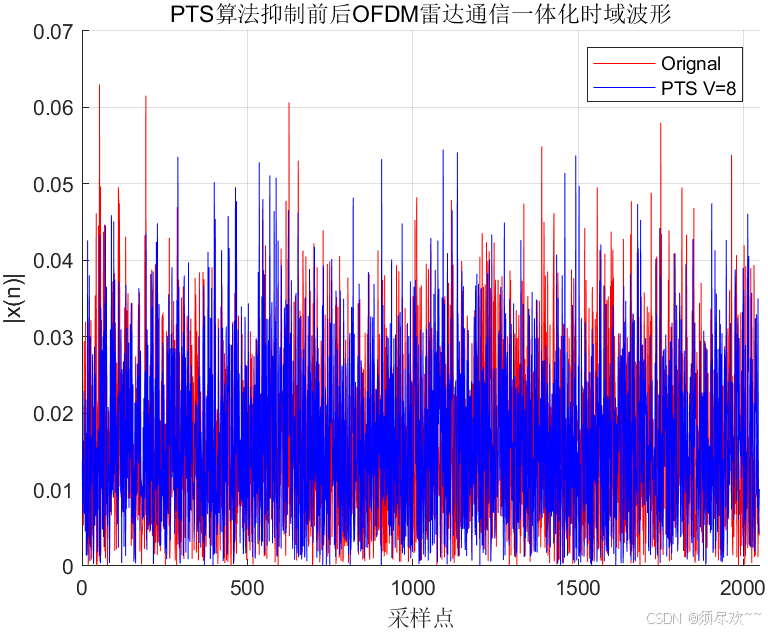
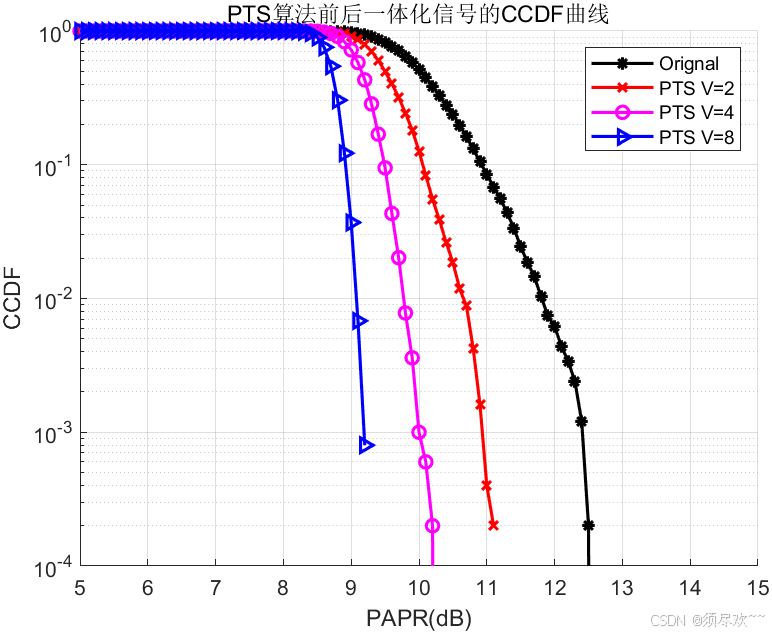
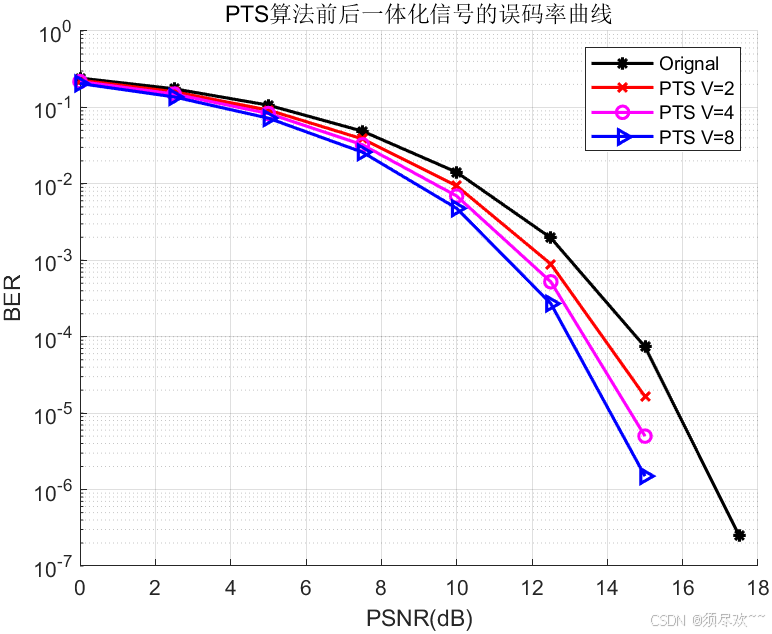
从图 3 可见,PTS 算法抑制前后 OFDM 雷达通信一体化时域波形峰值会有一定减小。如图 4 展示了分割子块个数 V V V 取 2、4和8时的 PAPR 性能。随着 V V V 取值增大时,即分组数量的增加,系统的 PAPR 性能越来越好。如图 5 所示,PTS 算法抑制后的OFDM雷达通信一体化信号误码率也会有显著的降低。但由此前的计算复杂度分析可知,PTS 算法的复杂度和子数据块的数量呈正相关,随着分组数的增多,PAPR性能的提升以提高算法的计算复杂度为代价。因此,在实际应用中,应该综合考虑PAPR性能和计算复杂度。
三、资源自取
下载链接:ZC-OFDM雷达通信一体化减小PAPR——部分传输序列法(PTS)
我的qq:2442391036,欢迎交流!



![【题解-洛谷】P8094 [USACO22JAN] Cow Frisbee S](https://i-blog.csdnimg.cn/direct/e3f2f317ab024b03a06b34de5c079c9a.png)