基于 AUTOSAR 的域控产品软件开发:从 CP 到 AP 的跨越
一、AUTOSAR AP 架构解析:面向智能汽车的自适应框架
(一)引言
随着汽车智能化向 L3+ 演进,传统 AUTOSAR CP(经典平台)在实时性、动态性和算力需求上的局限性日益凸显。AUTOSAR AP(自适应平台)应运而生,其核心定位是支持高性能计算、服务导向架构(SOA)及动态运行时环境,适用于自动驾驶域控、车载中央计算机等复杂场景。
(二)CP 与 AP 的核心差异对比
| 特性 | AUTOSAR CP | AUTOSAR AP | SEO 关键词 |
|---|---|---|---|
| 设计目标 | 传统 ECU(硬实时控制,如底盘、车身控制) | 智能域控(软实时计算,如自动驾驶、车联网) | CP 设计目标,AP 设计目标 |
| 编程语言 | C 语言为主 | C++ 为主,支持面向对象设计 | CP 编程语言,AP 编程语言 |
| 运行时环境 | 静态配置,启动后不可修改 | 动态运行时(ARA),支持在线重配置 | CP 运行时,AP 运行时 |
| 通信模型 | 基于信号(Signal-Based)的静态通信 | 基于服务(Service-Oriented)的动态发现与调用 | CP 通信模型,AP 通信模型 |
| 内存管理 | 静态内存分区 | 动态内存分配,支持 POSIX 标准 | CP 内存管理,AP 内存管理 |
| 典型硬件 | 单核/双核微控制器(如英飞凌 TC3xx) | 多核异构 SoC(如恩智浦 S32G、英飞凌 AURIXTM) | CP 硬件,AP 硬件 |
(三)AP 分层架构与核心组件
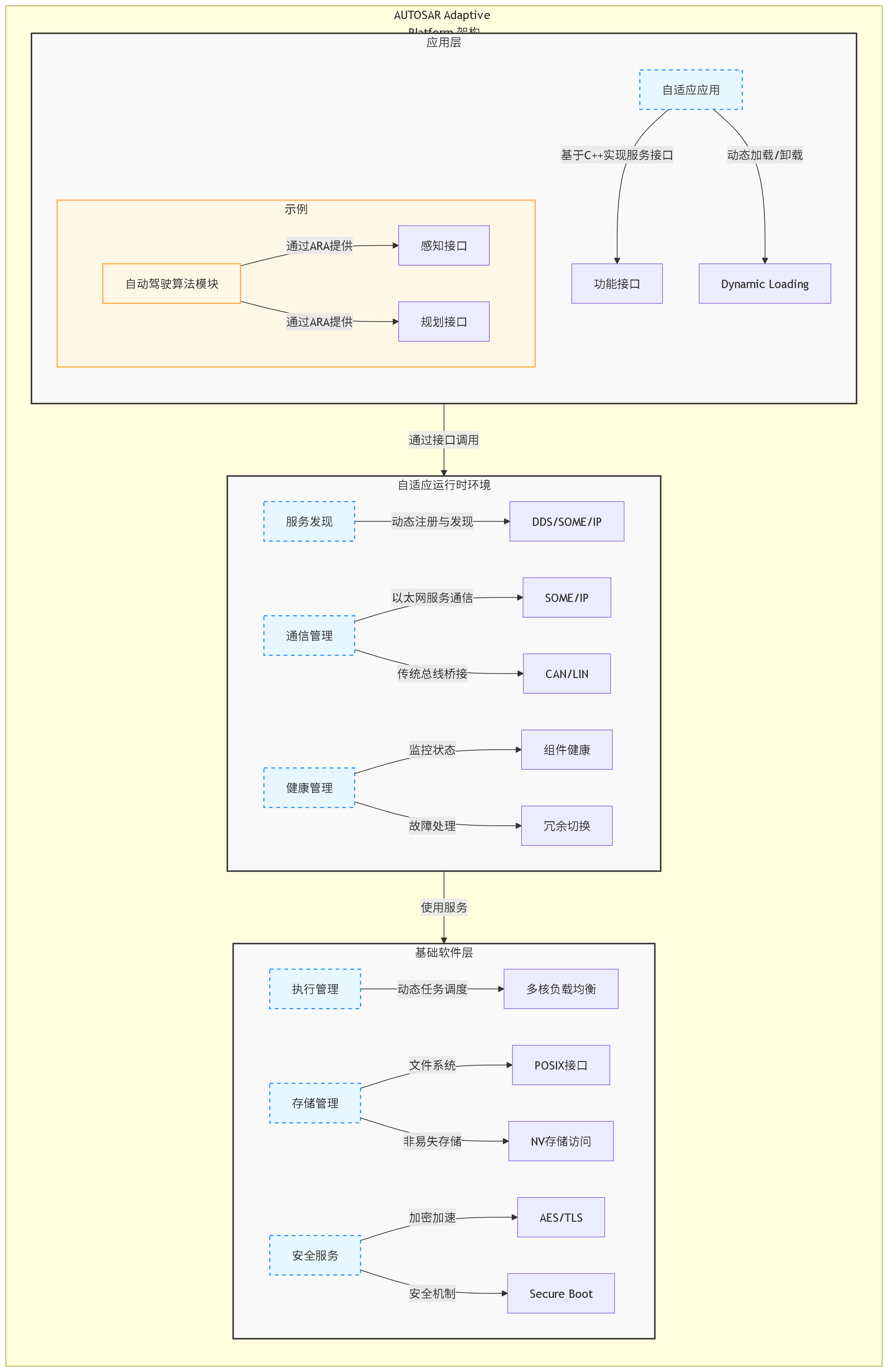
此图展示了 AUTOSAR AP 的分层结构,包括应用层、ARA 和基础软件层)
-
应用层 :由自适应应用(Adaptive Application)组成,基于 C++ 类实现服务接口,支持动态加载与卸载。
- 示例 :自动驾驶算法模块作为独立服务,通过 ARA 提供感知、规划等功能接口。
-
自适应运行时环境(ARA) :
- 服务发现(Service Discovery) :支持服务的动态注册与发现,如通过 DDS(数据分发服务)实现跨组件通信。
- 通信管理(Communication Management) :支持以太网服务通信(如 SOME/IP)和传统总线(CAN/LIN)的桥接。
- 健康管理(Health Management) :监控组件状态,支持故障冗余切换。
-
基础软件层(BSW AP) :
- 执行管理(Execution Management) :动态任务调度,支持多核 CPU 的负载均衡。
- 存储管理(Storage Management) :支持文件系统(如 POSIX 文件接口)和非易失性存储的动态访问。
- 安全服务(Security Services) :集成加密加速(如 AES/TLS)和安全启动(Secure Boot)机制。
AUTOSAR AP 架构是智能汽车软件开发的关键。其分层设计涵盖了应用层、ARA 和基础软件层,满足了高性能计算和动态运行时环境的需求。通过服务发现、通信管理和健康管理等功能,AP 为自动驾驶域控和车载中央计算机等复杂场景提供了强大的支持。
二、AUTOSAR AP 在域控开发中的关键实践
(一)基于 SOA 的自动驾驶域控开发
场景 :实现传感器融合与路径规划的分布式服务协作。
-
服务定义 :
-
// 感知服务接口(C++ 抽象类) class PerceptionService { public:virtual PointCloud getLidarData() = 0;virtual Image getCameraImage() = 0; };// 规划服务接口 class PlanningService { public:virtual Trajectory generateTrajectory(PointCloud& pc, Image& img) = 0; };
-
-
服务集成与通信 :通过 ARA 的服务发现机制,感知服务(Lidar/Camera 节点)与规划服务节点动态建立连接,使用 SOME/IP 协议传输数据。
-
// 服务客户端调用示例 PerceptionService* perception = Ara::ServiceDiscovery::locate<PerceptionService>("PerceptionService"); PlanningService* planning = Ara::ServiceDiscovery::locate<PlanningService>("PlanningService");PointCloud pc = perception->getLidarData(); Image img = perception->getCameraImage(); Trajectory traj = planning->generateTrajectory(pc, img);
-
基于 SOA 的自动驾驶域控开发是 AUTOSAR AP 的重要应用场景。通过服务定义和服务集成与通信,可以实现传感器融合与路径规划的分布式服务协作,提高系统的灵活性和可扩展性。
(二)多核异构 SoC 的资源调度优化
挑战 :域控芯片(如恩智浦 S32G)包含 CPU 核、GPU、NPU 等异构单元,需实现任务与硬件资源的动态匹配。
-
解决方案 :
- 使用 AP 的执行管理模块(Execution Manager)根据任务特性(如计算密集型、IO 密集型)分配至特定核心。
- 示例:神经网络推理任务分配至 NPU 核,通信任务分配至 CPU 核,通过共享内存(Shared Memory)实现数据交换。
在多核异构 SoC 的资源调度优化中,AUTOSAR AP 的执行管理模块发挥了关键作用。通过合理分配任务,可以充分发挥硬件资源的优势,提高系统的整体性能。
(三)功能安全与信息安全的融合方案
- 功能安全 :AP 支持 ISO 26262 ASIL-D 级别的安全机制,如通过冗余任务调度实现故障检测与恢复。
- 信息安全 :
-
基于 TLS 1.3 的通信加密:
-
// 使用 AP 安全服务创建加密通道 Security::TlsContext* tlsContext = Security::Tls::createContext("AutosarTlsContext"); tlsContext->setCertificate("server.crt"); tlsContext->setPrivateKey("server.key"); tlsContext->establishSecureChannel(remoteAddress);
-
-
安全启动流程:通过 AP 的 Bootloader 验证固件签名,防止恶意代码注入。
-
功能安全与信息安全的融合是 AUTOSAR AP 的重要特性。通过支持 ISO 26262 ASIL-D 级别的安全机制和基于 TLS 1.3 的通信加密,AP 为智能汽车的软件开发提供了可靠的安全保障。
三、工具链升级:从 CP 到 AP 的开发范式转变
| 工具链 | CP 场景 | AP 场景 | SEO 关键词 |
|---|---|---|---|
| 开发环境 | DaVinci Developer(图形化配置) | VS Code + CMake(代码驱动开发) | CP 开发环境,AP 开发环境 |
| 通信配置 | CANoe(静态信号矩阵) | Fast DDS(动态服务发现) | CP 通信配置,AP 通信配置 |
| 测试工具 | CANoe Test Automation(自动化测试) | Google Test + ASAM MCD-1(功能/性能测试) | CP 测试工具,AP 测试工具 |
| 持续集成 | 手动编译部署 | Jenkins + Docker(容器化持续集成) | CP 持续集成,AP 持续集成 |
案例 :使用 EBAutoCore AP 工具链开发自动驾驶域控软件:
- 通过 EBAutoCore Designer 定义服务接口与通信拓扑;
- 使用 EBAutoCore Builder 生成 C++ 代码框架;
- 借助 EBAutoCore Debugger 进行多核调试与性能分析。
从 CP 到 AP 的开发范式转变需要工具链的全面升级。通过使用 VS Code + CMake、Fast DDS、Google Test + ASAM MCD-1 和 Jenkins + Docker 等工具,可以更好地支持 AUTOSAR AP 的开发和测试。
四、未来趋势:CP 与 AP 的混合部署架构
在复杂域控系统中,常采用 CP+AP 混合架构 :
- CP 负责 :硬实时控制任务(如电机控制、安全关键逻辑);
- AP 负责 :软实时计算任务(如 AI 算法、车联网服务);
- 桥接机制 :通过 Gateway 模块实现 CP 信号与 AP 服务的转换,如使用 AUTOSAR 的 COM 模块转发信号至 SOME/IP 服务。
CP 和 AP 在混合架构中的分工与桥接方式
CP 与 AP 的混合部署架构是未来智能汽车软件开发的趋势。通过合理分工和桥接机制,可以充分发挥 CP 和 AP 的各自优势,满足复杂域控系统的需求。
五、实战案例
(一)案例一:某新势力车企自动驾驶域控——基于 AP 的 SOA 传感器融合
背景 :L3 级自动驾驶域控制器需集成 8 路摄像头、5 颗毫米波雷达、1 颗激光雷达,传统 CP 架构难以支撑动态传感器接入与算力调度。
技术方案 :
-
AP 架构设计 :
-
采用 NXP S32G2 多核 SoC (4x Arm Cortex-A53 + 2x Cortex-M7),AP 运行于 A53 核(POSIX 系统),CP 处理硬实时任务(M7 核)。
-
定义 感知服务(Perception Service) :封装激光雷达点云处理、摄像头语义分割算法,通过 ARA 服务发现 动态注册(如
LidarService_v1.0、CameraService_v2.0)。-
// 激光雷达服务接口(C++) class LidarService : public Ara::Service { public:virtual PointCloud getLidarData() = 0; // 实时点云数据virtual HealthStatus checkHealth() = 0; // 传感器健康状态 };
-
-
-
动态通信优化 :
- 传感器数据通过 SOME/IP over Ethernet 传输,带宽利用率从 CP 的 70% 降至 45%(动态压缩策略)。
- 引入 DDS(数据分发服务) 实现事件驱动:当激光雷达检测到障碍物时,主动触发路径规划服务(
PlanningService:: 紧急制动)。
-
健康管理与冗余 :
- AP 的 健康管理(PHM) 模块实时监控传感器状态,当单颗雷达失效时,自动切换至冗余雷达并通知诊断服务记录故障码(DTC)。
成效 :
- 软件迭代周期从 12 周缩短至 6 周(服务独立升级,无需全量编译);
- 算力利用率提升 30%(动态任务调度至 NPU 协处理器)。
在某新势力车企的自动驾驶域控案例中,基于 AP 的 SOA 传感器融合方案有效解决了传统 CP 架构在动态传感器接入与算力调度方面的难题,显著提升了系统的性能和可靠性。
(二)案例二:大众集团中央计算单元(CCU)——AP+CP 混合架构跨域协同
背景 :传统分布式 ECU 无法支撑 OTA 升级与跨域功能(如 “下车自动关窗 + 锁车 + 上传行车数据”)。
技术方案 :
-
混合架构设计 :
- AP 层 :运行智能座舱、车联网服务(基于 Linux POSIX),通过 服务桥接(Signal2Service) 将 CP 的车身控制信号(如门锁状态)转换为 RESTful API。
- CP 层 :保留车身控制硬实时逻辑(如车窗防夹),通过 COM 模块 与 AP 通信。
注:
- 上述架构图展示了大众集团 CCU 的 AP 和 CP 层之间通过网关模块进行通信和桥接的逻辑结构,体现了两者的分工与协作,以及如何实现跨域功能。
- 该架构设计实现了硬件资源共享和数据实时共享,使 CCU 能够将车辆控制、自动驾驶、智能座舱等多域功能融合在一起。
-
场景化服务编排 :
-
定义 “下车场景”组合服务 :
-
-
-
OTA 安全升级 :
- 利用 AP 的 UCM(更新与配置管理) 模块,支持服务级差分升级:仅下载座舱界面更新包(20MB),而非全量镜像(1.2GB),升级时间从 45 分钟降至 8 分钟。
成效 :
- 跨域功能开发效率提升 40%(可视化服务编排工具);
- OTA 故障率下降 75%(原子化升级 + 回滚机制)。
大众集团 CCU 的 AP+CP 混合架构跨域协同案例展示了如何通过混合架构设计和场景化服务编排,实现复杂功能并提升 OTA 升级的安全性和效率。
(三)案例三:博世智能驾驶域控——AP 多核异构调度与安全
背景 :L4 级自动驾驶需支持 200TOPS 算力,同时满足 ISO 26262 ASIL-D 功能安全与 ISO/SAE 21434 信息安全。
技术方案 :
-
硬件适配与调度 :
- 基于 英飞凌 AURIXTM TC4x + Mobileye EyeQ6 异构架构,AP 管理 EyeQ6 的 AI 算力(运行感知算法),CP 处理底盘控制(TC4x 内核)。
- 通过 AP 的 执行管理(EM) 模块,动态分配任务:高速路段将感知任务优先级提升 2 级(抢占式调度),泊车场景降低至背景优先级。
-
安全机制落地 :
-
功能安全 :AP 的健康监控(SHM)模块每 10ms 检测 AI 算法输出一致性,异常时触发冗余控制器接管(0.5ms 切换延迟)。
-
信息安全 :传感器数据传输采用 TLS 1.3 + 硬件加密引擎(SE) ,密钥通过 AP 的安全启动(Secure Boot)动态注入。
-
// 安全通信初始化(AP 代码) Security::Tls::init("tls_config.arxml"); // 加载证书与密钥 SensorService* radar = ServiceDiscovery::locate<SensorService>("Radar_Secure"); radar->setEncryption(Security::AES_256_GCM); // 强制加密
-
-
成效 :
- 算力利用率达 85%(行业平均 60%),功耗降低 22%(动态调频调压);
- 通过 ISO 26262 ASIL-D 认证,成为首个符合欧盟 UN R152 安全法规的域控方案。
博世智能驾驶域控案例体现了 AP 在多核异构调度与安全方面的强大能力。通过硬件适配与调度以及安全机制的落地,满足了 L4 级自动驾驶的高性能和高安全要求。
(四)案例四:比亚迪车云协同——AP 支持的 V2X 实时交互
背景 :实现车与充电桩、交通灯的实时通信(V2G/V2I),传统架构难以支持动态协议升级。
技术方案 :
-
服务化 V2X 接口 :
-
AP 定义 V2XService 标准接口,封装 802.11p、C-V2X 协议,支持动态加载新协议插件(如未来的 5G NR-V2X)。
-
<!-- ARXML 服务定义 --> <SWC_INTERFACE name="V2XService"><METHOD name="sendTrafficLightData"><PARAMETER name="lightState" type="uint8"/> <!-- 红/绿/黄 --></METHOD> </SWC_INTERFACE>
-
-
-
边缘计算协同 :
- 车辆进入路口时,AP 通过 服务发现 自动连接交通灯边缘节点(Edge Server),获取实时相位信息,优化车速(如 “绿波通行”)。
- 数据存储使用 AP 的 存储管理(SM) 模块,支持本地缓存 + 云端同步(差分同步减少流量 90%)。
成效 :
- 路口通行效率提升 18%,平均停车次数减少 2 次 /10km;
- 协议升级成本降低 60%(插件化更新,无需返厂)。
比亚迪车云协同案例展示了 AP 在支持 V2X 实时交互方面的优势。通过服务化 V2X 接口和边缘计算协同,实现了车与充电桩、交通灯的高效通信,并降低了协议升级成本。
六、案例总结:AP 落地的核心价值
| 维度 | 传统 CP 方案 | AP 方案(案例平均) | SEO 关键词 |
|---|---|---|---|
| 开发效率 | 单功能迭代 8-12 周 | 服务级迭代 2-4 周(↑66%) | CP 开发效率,AP 开发效率 |
| 算力利用率 | 50-60% | 75-85%(↑33%) | CP 算力利用率,AP 算力利用率 |
| 跨域协同成本 | 跨 ECU 开发成本占比 40% | 服务编排成本占比 15%(↓62%) | CP 跨域协同成本,AP 跨域协同成本 |
| OTA 支持 | 仅支持部分模块,成功率 82% | 全服务支持,成功率 98%(↑19%) | CP OTA 支持,AP OTA 支持 |
| 硬件适配周期 | 新芯片适配 6-12 个月 | 标准化 API,适配周期 2-3 个月(↓75%) | CP 硬件适配周期,AP 硬件适配周期 |
通过以上案例总结,可以看出 AUTOSAR AP 在开发效率、算力利用率、跨域协同成本、OTA 支持和硬件适配周期等方面相比传统 CP 方案具有显著优势。这些优势使得 AP 成为智能汽车软件开发的重要选择。
结尾 :通过融合 AUTOSAR CP 的稳定性与 AP 的灵活性,域控产品可同时满足实时控制与智能计算的双重需求,为下一代智能汽车的软件定义架构奠定基础。未来,随着 AP 与车云协同、AI 算法的深度融合,汽车电子将迎来更灵活、更智能的进化。